 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetworkwide Traffic State Forecasting Using Exogenous Information: A Multi-Dimensional Graph Attention-Based Approach
Oct 18, 2023Traffic state forecasting is crucial for traffic management and control strategies, as well as user- and system-level decision making in the transportation network. While traffic forecasting has been approached with a variety of techniques over the last couple of decades, most approaches simply rely on endogenous traffic variables for state prediction, despite the evidence that exogenous factors can significantly impact traffic conditions. This paper proposes a multi-dimensional spatio-temporal graph attention-based traffic prediction approach (M-STGAT), which predicts traffic based on past observations of speed, along with lane closure events, temperature, and visibility across the transportation network. The approach is based on a graph attention network architecture, which also learns based on the structure of the transportation network on which these variables are observed. Numerical experiments are performed using traffic speed and lane closure data from the California Department of Transportation (Caltrans) Performance Measurement System (PeMS). The corresponding weather data were downloaded from the National Oceanic and Atmospheric Administration (NOOA) Automated Surface Observing Systems (ASOS). For comparison, the numerical experiments implement three alternative models which do not allow for the multi-dimensional input. The M-STGAT is shown to outperform the three alternative models, when performing tests using our primary data set for prediction with a 30-, 45-, and 60-minute prediction horizon, in terms of three error measures: Mean Absolute Error (MAE), Root Mean Square Error (RMSE) and Mean Absolute Percentage Error (MAPE). However, the model's transferability can vary for different transfer data sets and this aspect may require further investigation.
Efficient Traffic State Forecasting using Spatio-Temporal Network Dependencies: A Sparse Graph Neural Network Approach
Nov 06, 2022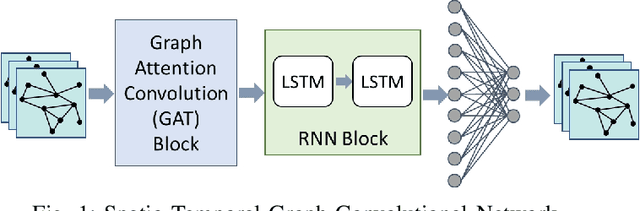
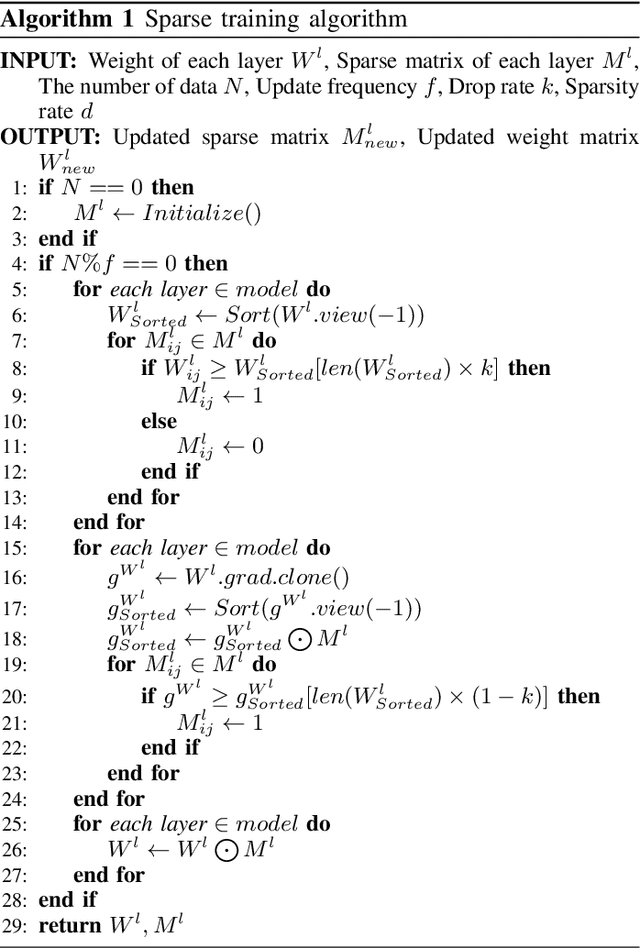
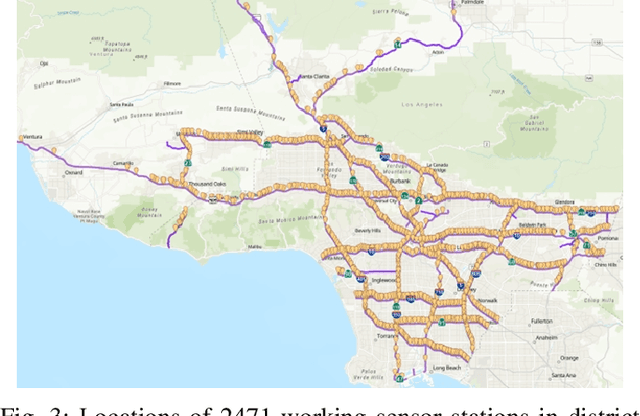
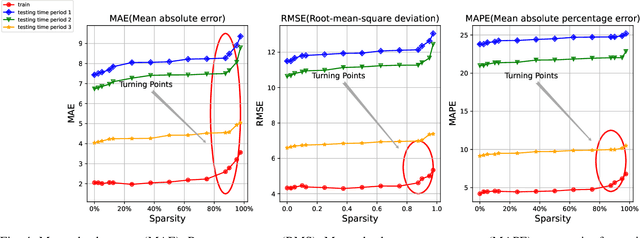
Traffic state prediction in a transportation network is paramount for effective traffic operations and management, as well as informed user and system-level decision-making. However, long-term traffic prediction (beyond 30 minutes into the future) remains challenging in current research. In this work, we integrate the spatio-temporal dependencies in the transportation network from network modeling, together with the graph convolutional network (GCN) and graph attention network (GAT). To further tackle the dramatic computation and memory cost caused by the giant model size (i.e., number of weights) caused by multiple cascaded layers, we propose sparse training to mitigate the training cost, while preserving the prediction accuracy. It is a process of training using a fixed number of nonzero weights in each layer in each iteration. We consider the problem of long-term traffic speed forecasting for a real large-scale transportation network data from the California Department of Transportation (Caltrans) Performance Measurement System (PeMS). Experimental results show that the proposed GCN-STGT and GAT-STGT models achieve low prediction errors on short-, mid- and long-term prediction horizons, of 15, 30 and 45 minutes in duration, respectively. Using our sparse training, we could train from scratch with high sparsity (e.g., up to 90%), equivalent to 10 times floating point operations per second (FLOPs) reduction on computational cost using the same epochs as dense training, and arrive at a model with very small accuracy loss compared with the original dense training
Anticipatory Fleet Repositioning for Shared-use Autonomous Mobility Services: An Optimization and Learning-Based Approach
Oct 16, 2022With the development of mobility-on-demand services, increasing sources of rich transportation data, and the advent of autonomous vehicles (AVs), there are significant opportunities for shared-use AV mobility services (SAMSs) to provide accessible and demand-responsive personal mobility. This paper focuses on the problem of anticipatory repositioning of idle vehicles in a SAMS fleet to enable better assignment decisions in serving future demand. The rebalancing problem is formulated as a Markov Decision Process and a reinforcement learning approach using an advantage actor critic (A2C) method is proposed to learn a rebalancing policy that anticipates future demand and cooperates with an optimization-based assignment strategy. The proposed formulation and solution approach allow for centralized repositioning decisions for the entire vehicle fleet but ensure that the problem size does not change with the size of the vehicle fleet. Using an agent-based simulation tool and New York City taxi data to simulate demand for rides in a SAMS system, two versions of the A2C AV repositioning approach are tested: A2C-AVR(A) observing past demand for rides and learning to anticipate future demand, and A2C-AVR(B) that receives demand forecasts. Numerical experiments demonstrate that the A2C-AVR approaches significantly reduce mean passenger wait times relative to an alternative optimization-based rebalancing approach, at the expense of slightly increased percentage of empty fleet miles travelled. The experiments show comparable performance between the A2C-AVR(A) and (B), indicating that the approach can anticipate future demand based on past demand observations. Testing with various demand and time-of-day scenarios, and an alternative assignment strategy, experiments demonstrate the models transferability to cases unseen at the training stage.