 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti Agent Reinforcement Learning Trajectory Design and Two-Stage Resource Management in CoMP UAV VLC Networks
Dec 03, 2021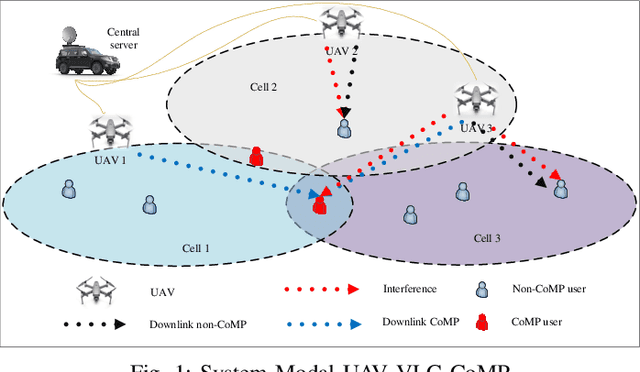
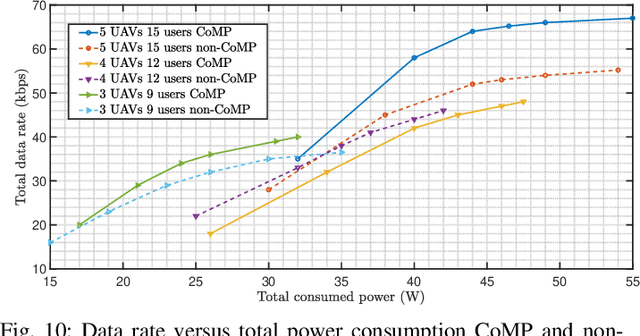
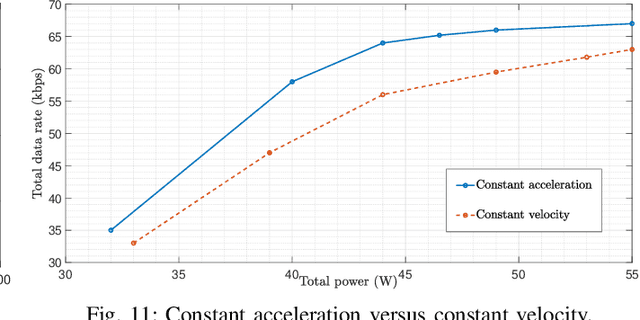
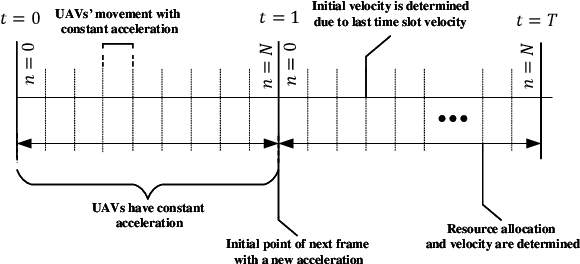
In this paper, we consider unmanned aerial vehicles (UAVs) equipped with a visible light communication (VLC) access point and coordinated multipoint (CoMP) capability that allows users to connect to more than one UAV. UAVs can move in 3-dimensional (3D) at a constant acceleration, where a central server is responsible for synchronization and cooperation among UAVs. The effect of accelerated motion in UAV is necessary to be considered. Unlike most existing works, we examine the effects of variable speed on kinetics and radio resource allocations. For the proposed system model, we define two different time frames. In the frame, the acceleration of each UAV is specified, and in each slot, radio resources are allocated. Our goal is to formulate a multiobjective optimization problem where the total data rate is maximized, and the total communication power consumption is minimized simultaneously. To handle this multiobjective optimization, we first apply the scalarization method and then apply multi-agent deep deterministic policy gradient (MADDPG). We improve this solution method by adding two critic networks together with two-stage resources allocation. Simulation results indicate that the constant acceleration motion of UAVs shows about 8\% better results than conventional motion systems in terms of performance.