 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValue of Assistance for Grasping
Oct 22, 2023In many realistic settings, a robot is tasked with grasping an object without knowing its exact pose. Instead, the robot relies on a probabilistic estimation of the pose to decide how to attempt the grasp. We offer a novel Value of Assistance (VOA) measure for assessing the expected effect a specific observation will have on the robot's ability to successfully complete the grasp. Thus, VOA supports the decision of which sensing action would be most beneficial to the grasping task. We evaluate our suggested measures in both simulated and real-world robotic settings.
Deep-Learning based Motion Correction for Myocardial T1 Mapping
Sep 21, 2021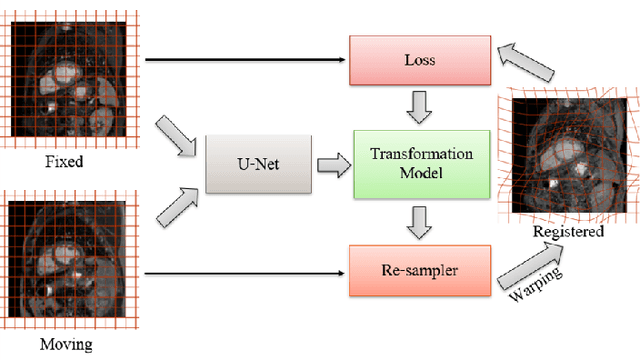
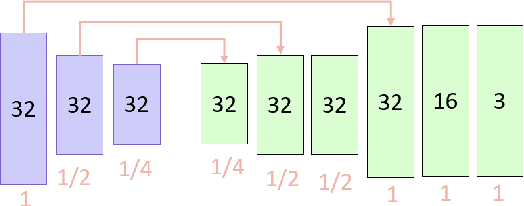

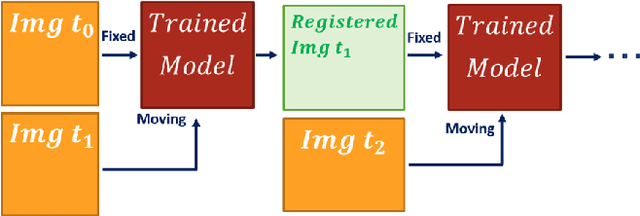
Myocardial T1 mapping is a cardiac MRI technique, used to assess myocardial fibrosis. In this technique, a series of T1-weighted MRI images are acquired with different saturation or inversion times. These images are fitted to the T1 model to estimate the model parameters and construct the desired T1 maps. In the presence of motion, the different T1-weighted images are not aligned. This, in turn, will cause errors and inaccuracies in the final estimation of the T1 maps. Therefore, motion correction is a necessary process for myocardial T1 mapping. We present a deep-learning (DL) based system for cardiac T1-weighted MRI images motion correction. When applying our DL-based motion correction system we achieve a statistically significant improved performance by means of R2 of the model fitting regression, in compared to the model fitting regression without motion correction (0.52 vs 0.29, p<0.05).