 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal Data-Enhanced Foundation Models for Prediction and Control in Wireless Networks: A Survey
Jan 06, 2026Foundation models (FMs) are recognized as a transformative breakthrough that has started to reshape the future of artificial intelligence (AI) across both academia and industry. The integration of FMs into wireless networks is expected to enable the development of general-purpose AI agents capable of handling diverse network management requests and highly complex wireless-related tasks involving multi-modal data. Inspired by these ideas, this work discusses the utilization of FMs, especially multi-modal FMs in wireless networks. We focus on two important types of tasks in wireless network management: prediction tasks and control tasks. In particular, we first discuss FMs-enabled multi-modal contextual information understanding in wireless networks. Then, we explain how FMs can be applied to prediction and control tasks, respectively. Following this, we introduce the development of wireless-specific FMs from two perspectives: available datasets for development and the methodologies used. Finally, we conclude with a discussion of the challenges and future directions for FM-enhanced wireless networks.
Conditional Denoising Diffusion for ISAC Enhanced Channel Estimation in Cell-Free 6G
Jun 07, 2025Cell-free Integrated Sensing and Communication (ISAC) aims to revolutionize 6th Generation (6G) networks. By combining distributed access points with ISAC capabilities, it boosts spectral efficiency, situational awareness, and communication reliability. Channel estimation is a critical step in cell-free ISAC systems to ensure reliable communication, but its performance is usually limited by challenges such as pilot contamination and noisy channel estimates. This paper presents a novel framework leveraging sensing information as a key input within a Conditional Denoising Diffusion Model (CDDM). In this framework, we integrate CDDM with a Multimodal Transformer (MMT) to enhance channel estimation in ISAC-enabled cell-free systems. The MMT encoder effectively captures inter-modal relationships between sensing and location data, enabling the CDDM to iteratively denoise and refine channel estimates. Simulation results demonstrate that the proposed approach achieves significant performance gains. As compared with Least Squares (LS) and Minimum Mean Squared Error (MMSE) estimators, the proposed model achieves normalized mean squared error (NMSE) improvements of 8 dB and 9 dB, respectively. Moreover, we achieve a 27.8% NMSE improvement compared to the traditional denoising diffusion model (TDDM), which does not incorporate sensing channel information. Additionally, the model exhibits higher robustness against pilot contamination and maintains high accuracy under challenging conditions, such as low signal-to-noise ratios (SNRs). According to the simulation results, the model performs well for users near sensing targets by leveraging the correlation between sensing and communication channels.
Beam Selection in ISAC using Contextual Bandit with Multi-modal Transformer and Transfer Learning
Mar 11, 2025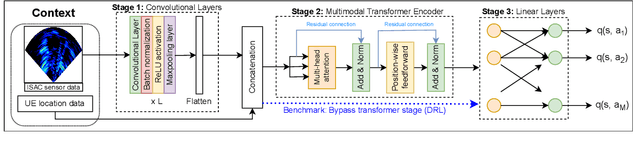
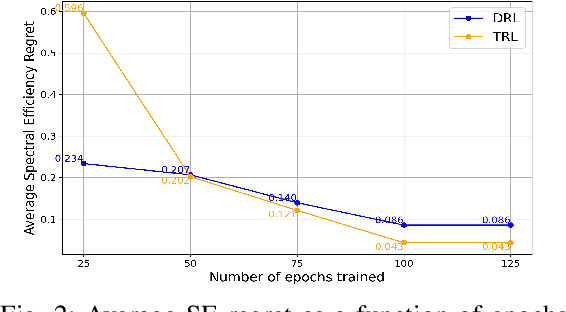
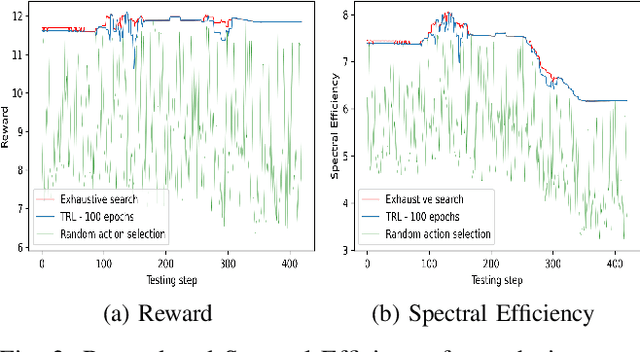
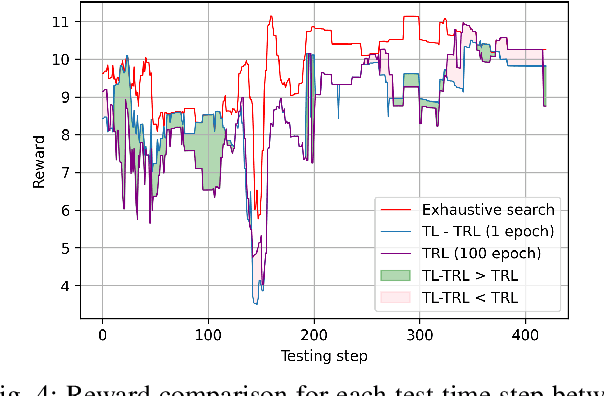
Sixth generation (6G) wireless technology is anticipated to introduce Integrated Sensing and Communication (ISAC) as a transformative paradigm. ISAC unifies wireless communication and RADAR or other forms of sensing to optimize spectral and hardware resources. This paper presents a pioneering framework that leverages ISAC sensing data to enhance beam selection processes in complex indoor environments. By integrating multi-modal transformer models with a multi-agent contextual bandit algorithm, our approach utilizes ISAC sensing data to improve communication performance and achieves high spectral efficiency (SE). Specifically, the multi-modal transformer can capture inter-modal relationships, enhancing model generalization across diverse scenarios. Experimental evaluations on the DeepSense 6G dataset demonstrate that our model outperforms traditional deep reinforcement learning (DRL) methods, achieving superior beam prediction accuracy and adaptability. In the single-user scenario, we achieve an average SE regret improvement of 49.6% as compared to DRL. Furthermore, we employ transfer reinforcement learning to reduce training time and improve model performance in multi-user environments. In the multi-user scenario, this approach enhances the average SE regret, which is a measure to demonstrate how far the learned policy is from the optimal SE policy, by 19.7% compared to training from scratch, even when the latter is trained 100 times longer.
Reinforcement Learning based Multi-connectivity Resource Allocation in Factory Automation Systems
Aug 26, 2022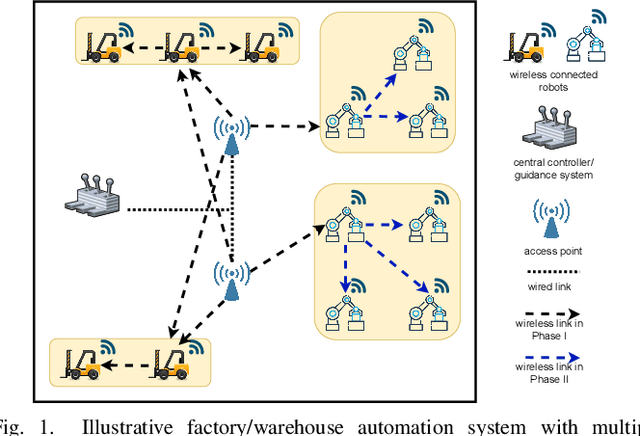

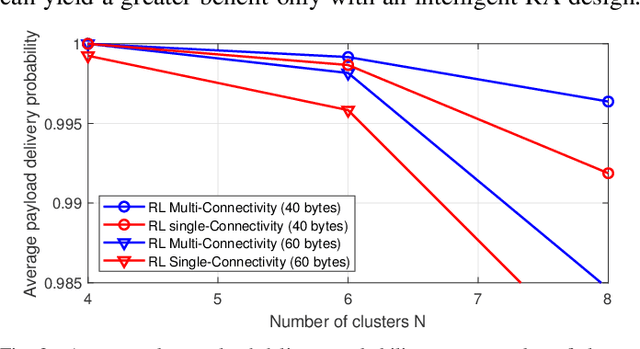
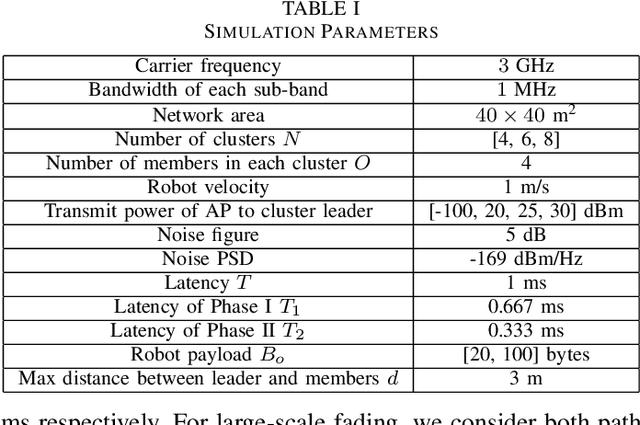
We propose joint user association, channel assignment and power allocation for mobile robot Ultra-Reliable and Low Latency Communications (URLLC) based on multi-connectivity and reinforcement learning. The mobile robots require control messages from the central guidance system at regular intervals. We use a two-phase communication scheme where robots can form multiple clusters. The robots in a cluster are close to each other and can have reliable Device-to-Device (D2D) communications. In Phase I, the APs transmit the combined payload of a cluster to the cluster leader within a latency constraint. The cluster leader broadcasts this message to its members in Phase II. We develop a distributed Multi-Agent Reinforcement Learning (MARL) algorithm for joint user association and resource allocation (RA) for Phase I. The cluster leaders use their local Channel State Information (CSI) to decide the APs for connection along with the sub-band and power level. The cluster leaders utilize multi-connectivity to connect to multiple APs to increase their reliability. The objective is to maximize the successful payload delivery probability for all robots. Illustrative simulation results indicate that the proposed scheme can approach the performance of the centralized algorithm and offer a substantial gain in reliability as compared to single-connectivity (when cluster leaders are able to connect to 1 AP).