 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-Shot Observation Learning
Oct 17, 2018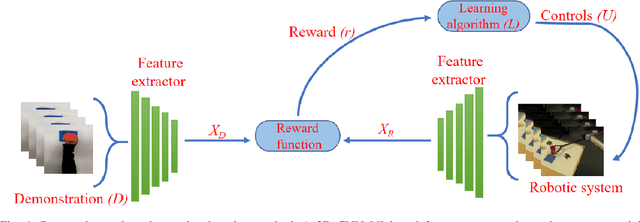
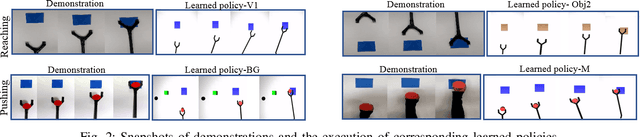
Observation learning is the process of learning a task by observing an expert demonstrator. We present a robust observation learning method for robotic systems. Our principle contributions are in introducing a one shot learning method where only a single demonstration is needed for learning and in proposing a novel feature extraction method for extracting unique activity features from the demonstration. Reward values are then generated from these demonstrations. We use a learning algorithm with these rewards to learn the controls for a robotic manipulator to perform the demonstrated task. With simulation and real robot experiments, we show that the proposed method can be used to learn tasks from a single demonstration under varying conditions of viewpoints, object properties, morphology of manipulators and scene backgrounds.