 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinesthetic Teaching in Robotics: a Mixed Reality Approach
Sep 03, 2024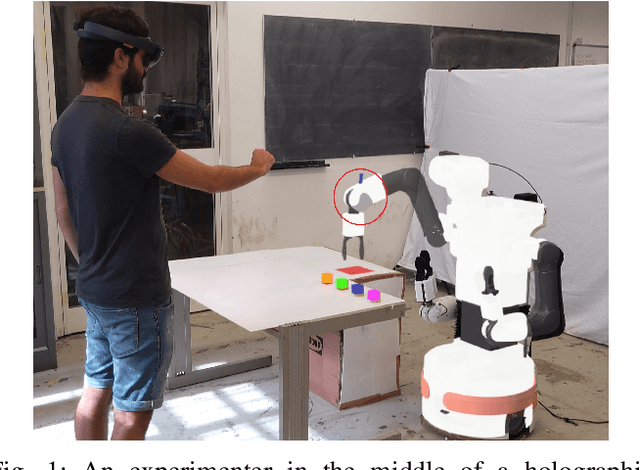
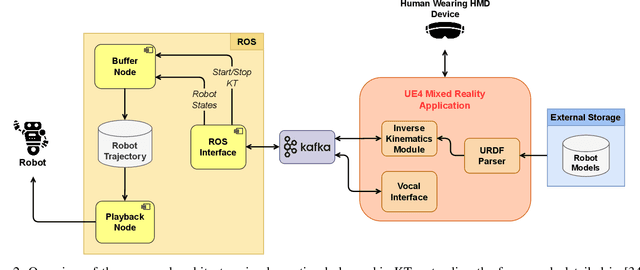
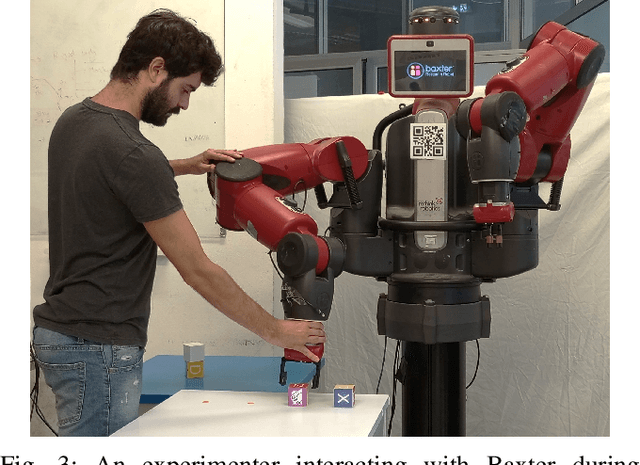
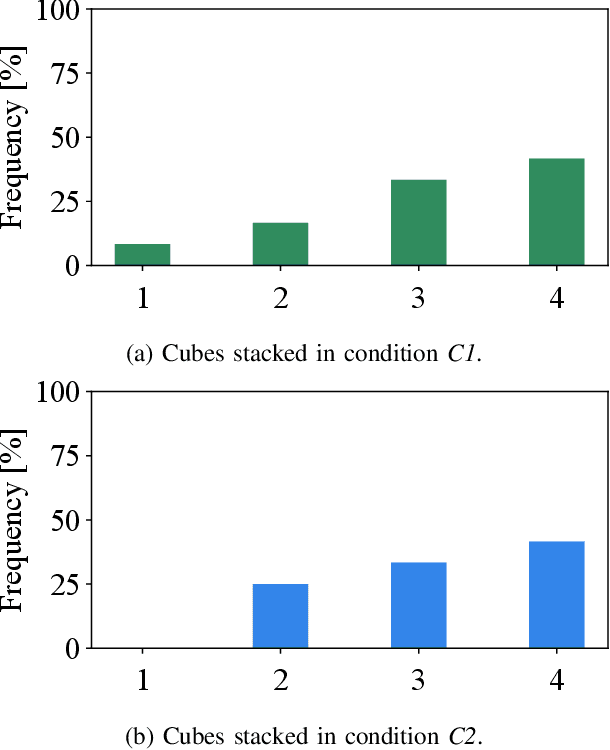
As collaborative robots become more common in manufacturing scenarios and adopted in hybrid human-robot teams, we should develop new interaction and communication strategies to ensure smooth collaboration between agents. In this paper, we propose a novel communicative interface that uses Mixed Reality as a medium to perform Kinesthetic Teaching (KT) on any robotic platform. We evaluate our proposed approach in a user study involving multiple subjects and two different robots, comparing traditional physical KT with holographic-based KT through user experience questionnaires and task-related metrics.
Investigating Mixed Reality for Communication Between Humans and Mobile Manipulators
Sep 03, 2024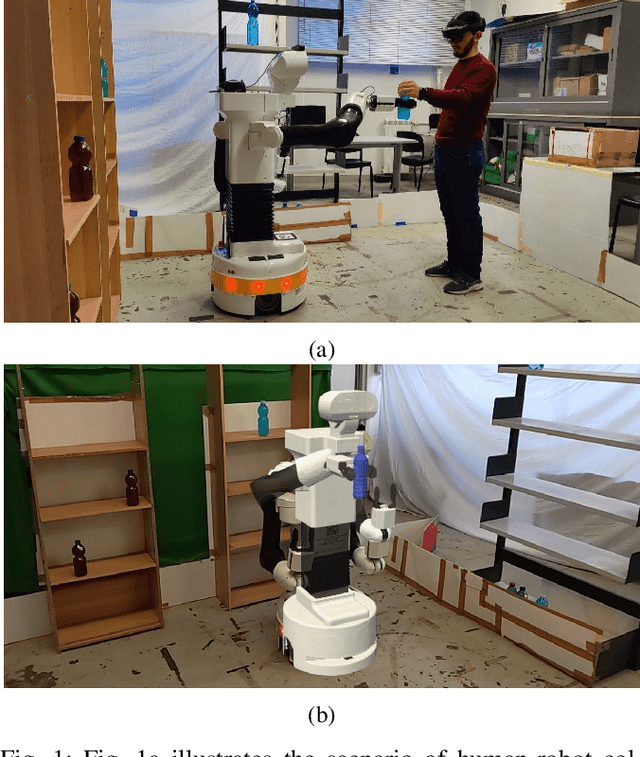
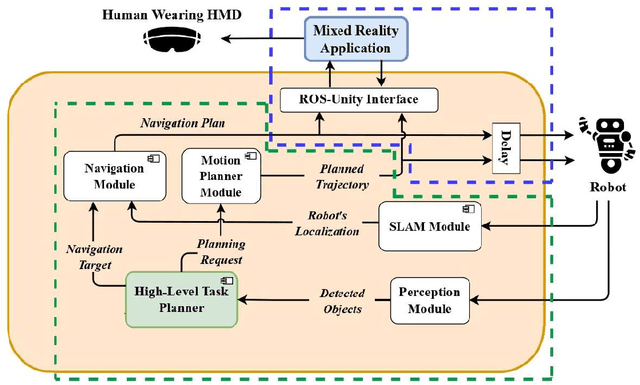
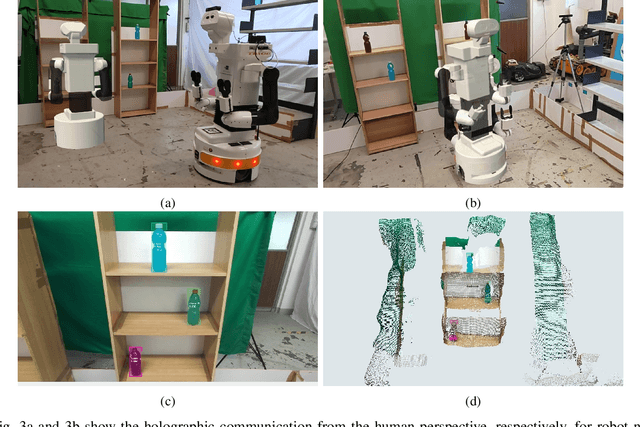
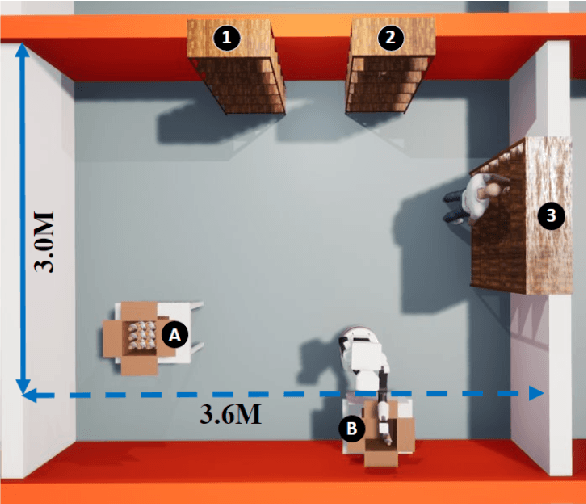
This article investigates mixed reality (MR) to enhance human-robot collaboration (HRC). The proposed solution adopts MR as a communication layer to convey a mobile manipulator's intentions and upcoming actions to the humans with whom it interacts, thus improving their collaboration. A user study involving 20 participants demonstrated the effectiveness of this MR-focused approach in facilitating collaborative tasks, with a positive effect on overall collaboration performances and human satisfaction.
Digital Twins for Human-Robot Collaboration: A Future Perspective
Nov 04, 2023
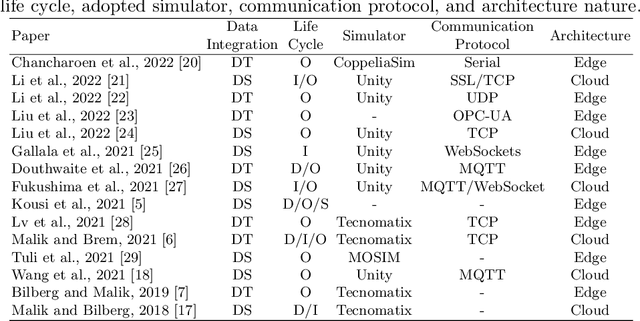
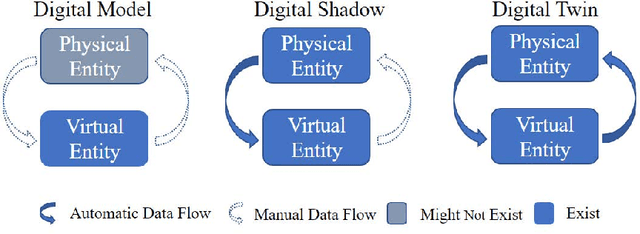
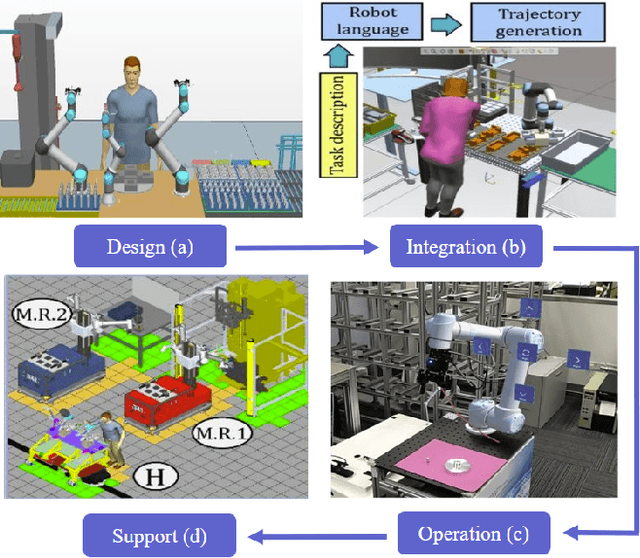
As collaborative robot (Cobot) adoption in many sectors grows, so does the interest in integrating digital twins in human-robot collaboration (HRC). Virtual representations of physical systems (PT) and assets, known as digital twins, can revolutionize human-robot collaboration by enabling real-time simulation, monitoring, and control. In this article, we present a review of the state-of-the-art and our perspective on the future of digital twins (DT) in human-robot collaboration. We argue that DT will be crucial in increasing the efficiency and effectiveness of these systems by presenting compelling evidence and a concise vision of the future of DT in human-robot collaboration, as well as insights into the possible advantages and challenges associated with their integration.
RICO-MR: An Open-Source Architecture for Robot Intent Communication through Mixed Reality
Sep 09, 2023



This article presents an open-source architecture for conveying robots' intentions to human teammates using Mixed Reality and Head-Mounted Displays. The architecture has been developed focusing on its modularity and re-usability aspects. Both binaries and source code are available, enabling researchers and companies to adopt the proposed architecture as a standalone solution or to integrate it in more comprehensive implementations. Due to its scalability, the proposed architecture can be easily employed to develop shared Mixed Reality experiences involving multiple robots and human teammates in complex collaborative scenarios.