 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging simulation and reality in subsurface radar-based sensing: physics-guided hierarchical domain adaptation with deep adversarial learning
Dec 19, 2025Accurate estimation of subsurface material properties, such as soil moisture, is critical for wildfire risk assessment and precision agriculture. Ground-penetrating radar (GPR) is a non-destructive geophysical technique widely used to characterize subsurface conditions. Data-driven parameter estimation methods typically require large amounts of labeled training data, which is expensive to obtain from real-world GPR scans under diverse subsurface conditions. A physics-based GPR model using the finite-difference time-domain (FDTD) method can be employed to generate large synthetic datasets through simulations across varying material parameters, which are then utilized to train data-driven models. A key limitation, however, is that simulated data (source domain) and real-world data (target domain) often follow different distributions, which can cause data-driven models trained on simulations to underperform in real-world scenarios. To address this challenge, this study proposes a novel physics-guided hierarchical domain adaptation framework with deep adversarial learning for robust subsurface material property estimation from GPR signals. The proposed framework is systematically evaluated through the laboratory tests for single- and two-layer materials, as well as the field tests for single- and two-layer materials, and is benchmarked against state-of-the-art methods, including the one-dimensional convolutional neural network (1D CNN) and domain adversarial neural network (DANN). The results demonstrate that the proposed framework achieves higher correlation coefficients R and lower Bias between the predicted and measured parameter values, along with smaller standard deviations in the estimations, thereby validating their effectiveness in bridging the domain gap between simulated and real-world radar signals and enabling efficient subsurface material property retrieval.
UAV-Based Remote Sensing of Soil Moisture Across Diverse Land Covers: Validation and Bayesian Uncertainty Characterization
Jun 05, 2025High-resolution soil moisture (SM) observations are critical for agricultural monitoring, forestry management, and hazard prediction, yet current satellite passive microwave missions cannot directly provide retrievals at tens-of-meter spatial scales. Unmanned aerial vehicle (UAV) mounted microwave radiometry presents a promising alternative, but most evaluations to date have focused on agricultural settings, with limited exploration across other land covers and few efforts to quantify retrieval uncertainty. This study addresses both gaps by evaluating SM retrievals from a drone-based Portable L-band Radiometer (PoLRa) across shrubland, bare soil, and forest strips in Central Illinois, U.S., using a 10-day field campaign in 2024. Controlled UAV flights at altitudes of 10 m, 20 m, and 30 m were performed to generate brightness temperatures (TB) at spatial resolutions of 7 m, 14 m, and 21 m. SM retrievals were carried out using multiple tau-omega-based algorithms, including the single channel algorithm (SCA), dual channel algorithm (DCA), and multi-temporal dual channel algorithm (MTDCA). A Bayesian inference framework was then applied to provide probabilistic uncertainty characterization for both SM and vegetation optical depth (VOD). Results show that the gridded TB distributions consistently capture dry-wet gradients associated with vegetation density variations, and spatial correlations between polarized observations are largely maintained across scales. Validation against in situ measurements indicates that PoLRa derived SM retrievals from the SCAV and MTDCA algorithms achieve unbiased root-mean-square errors (ubRMSE) generally below 0.04 m3/m3 across different land covers. Bayesian posterior analyses confirm that reference SM values largely fall within the derived uncertainty intervals, with mean uncertainty ranges around 0.02 m3/m3 and 0.11 m3/m3 for SCA and DCA related retrievals.
Sub-Meter Remote Sensing of Soil Moisture Using Portable L-band Microwave Radiometer
Sep 25, 2024Spaceborne microwave passive soil moisture products are known for their accuracy but are often limited by coarse spatial resolutions. This limits their ability to capture finer soil moisture gradients and hinders their applications. The Portable L band radiometer (PoLRa) offers soil moisture measurements from submeter to tens of meters depending on the altitude of measurement. Given that the assessments of soil moisture derived from this sensor are notably lacking, this study aims to evaluate the performance of submeter soil moisture retrieved from PoLRa mounted on poles at four different locations in central Illinois, USA. The evaluation focuses on the consistency of PoLRa measured brightness temperatures from different directions relative to the same area, and the accuracy of PoLRa derived soil moisture. As PoLRa shares many aspects of the L band radiometer onboard the NASA Soil Moisture Active Passive (SMAP) mission, two SMAP operational algorithms and the conventional dual channel algorithm were applied to calculate soil moisture from the measured brightness temperatures. The vertically polarized brightness temperatures from the PoLRa are typically more stable than their horizontally polarized counterparts. In each test period, the standard deviations of observed dual polarization brightness temperatures are generally less than 5 K. By comparing PoLRa based soil moisture retrievals against the moisture values obtained by handheld time domain reflectometry, the unbiased root mean square error and the Pearson correlation coefficient are mostly below 0.04 and above 0.75, confirming the high accuracy of PoLRa derived soil moisture retrievals and the feasibility of utilizing SMAP algorithms for PoLRa data. These findings highlight the significant potential of ground or drone based PoLRa measurements as a standalone reference for future spaceborne L band sensors.
Joint Soil and Above-Ground Biomass Characterization Using Radars
Apr 23, 2024



Soil moisture sensing through biomass or vegetation canopy has challenged researchers, even those who use SAR sensors with penetration capabilities. This is mainly due to the imposed extra time and phase offsets on Radio Frequency (RF) signals as they travel through the canopy. These offsets depend on the vegetation canopy moisture and height, both of which are typically unknown in agricultural and forest fields. In this paper, we leverage the mobility of an unmanned aerial system (UAS) to collect spatially-diverse radar measurements, enabling the joint estimation of soil moisture, above-ground biomass moisture, and biomass height, all without assuming any calibration steps. We leverage the changes in time-of-flight (ToF) and angle-of-arrival (AoA) measurements of reflected radar signals as the UAS flies above a reflector buried under the soil. We demonstrate the effectiveness of our algorithm by simulating its performance under realistic measurement noises as well as conducting lab experiments with different types of above-ground biomass. Our simulation results conclude that our algorithm is capable of estimating volumetric soil moisture to less than 1% median absolute error (MAE), vegetation height to 11.1cm MAE, and vegetation relative permittivity to 0.32 MAE. Our experimental results demonstrate the effectiveness of the proposed method in practical scenarios for varying biomass moistures and heights.
Dual-Frequency Radar Wave-Inversion for Sub-Surface Material Characterization
Mar 28, 2024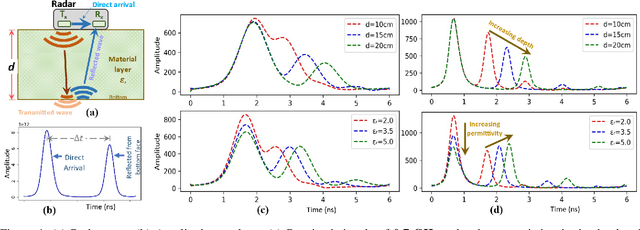


Moisture estimation of sub-surface soil and the overlaying biomass layer is pivotal in precision agriculture and wildfire risk assessment. However, the characterization of layered material is nontrivial due to the radar penetration-resolution tradeoff. Here, a waveform inversion-based method was proposed for predicting the dielectric permittivity (as a moisture proxy) of the bottom soil layer and the top biomass layer from radar signals. Specifically, the use of a combination of a higher and a lower frequency radar compared to a single frequency in predicting the permittivity of both the soil and the overlaying layer was investigated in this study. The results show that each layer was best characterized via one of the frequencies. However, for the simultaneous prediction of both layers permittivity, the most consistent results were achieved by inversion of data from a combination of both frequencies, showing better correlation with in situ permittivity and reduced prediction errors.
FUELVISION: A Multimodal Data Fusion and Multimodel Ensemble Algorithm for Wildfire Fuels Mapping
Mar 19, 2024Accurate assessment of fuel conditions is a prerequisite for fire ignition and behavior prediction, and risk management. The method proposed herein leverages diverse data sources including Landsat-8 optical imagery, Sentinel-1 (C-band) Synthetic Aperture Radar (SAR) imagery, PALSAR (L-band) SAR imagery, and terrain features to capture comprehensive information about fuel types and distributions. An ensemble model was trained to predict landscape-scale fuels such as the 'Scott and Burgan 40' using the as-received Forest Inventory and Analysis (FIA) field survey plot data obtained from the USDA Forest Service. However, this basic approach yielded relatively poor results due to the inadequate amount of training data. Pseudo-labeled and fully synthetic datasets were developed using generative AI approaches to address the limitations of ground truth data availability. These synthetic datasets were used for augmenting the FIA data from California to enhance the robustness and coverage of model training. The use of an ensemble of methods including deep learning neural networks, decision trees, and gradient boosting offered a fuel mapping accuracy of nearly 80\%. Through extensive experimentation and evaluation, the effectiveness of the proposed approach was validated for regions of the 2021 Dixie and Caldor fires. Comparative analyses against high-resolution data from the National Agriculture Imagery Program (NAIP) and timber harvest maps affirmed the robustness and reliability of the proposed approach, which is capable of near-real-time fuel mapping.
UAS-based Automated Structural Inspection Path Planning via Visual Data Analytics and Optimization
Dec 22, 2023Unmanned Aerial Systems (UAS) have gained significant traction for their application in infrastructure inspections. However, considering the enormous scale and complex nature of infrastructure, automation is essential for improving the efficiency and quality of inspection operations. One of the core problems in this regard is electing an optimal automated flight path that can achieve the mission objectives while minimizing flight time. This paper presents an effective formulation for the path planning problem in the context of structural inspections. Coverage is guaranteed as a constraint to ensure damage detectability and path length is minimized as an objective, thus maximizing efficiency while ensuring inspection quality. A two-stage algorithm is then devised to solve the path planning problem, composed of a genetic algorithm for determining the positions of viewpoints and a greedy algorithm for calculating the poses. A comprehensive sensitivity analysis is conducted to demonstrate the proposed algorithm's effectiveness and range of applicability. Applied examples of the algorithm, including partial space inspection with no-fly zones and focused inspection, are also presented, demonstrating the flexibility of the proposed method to meet real-world structural inspection requirements. In conclusion, the results of this study highlight the feasibility of the proposed approach and establish the groundwork for incorporating automation into UAS-based structural inspection mission planning.
Bayesian inversion of GPR waveforms for uncertainty-aware sub-surface material characterization
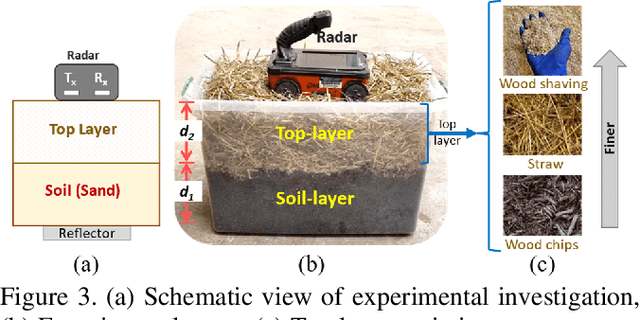
Dec 13, 2023Accurate estimation of sub-surface properties like moisture content and depth of layers is crucial for applications spanning sub-surface condition monitoring, precision agriculture, and effective wildfire risk assessment. Soil in nature is often covered by overlaying surface material, making its characterization using conventional methods challenging. In addition, the estimation of the properties of the overlaying layer is crucial for applications like wildfire assessment. This study thus proposes a Bayesian model-updating-based approach for ground penetrating radar (GPR) waveform inversion to predict sub-surface properties like the moisture contents and depths of the soil layer and overlaying material accumulated above the soil. The dielectric permittivity of material layers were predicted with the proposed method, along with other parameters, including depth and electrical conductivity of layers. The proposed Bayesian model updating approach yields probabilistic estimates of these parameters that can provide information about the confidence and uncertainty related to the estimates. The methodology was evaluated for a diverse range of experimental data collected through laboratory and field investigations. Laboratory investigations included variations in soil moisture values and depth of the top layer (or overlaying material), and the field investigation included measurement of field soil moisture for sixteen days. The results demonstrated predictions consistent with time-domain reflectometry (TDR) measurements and conventional gravimetric tests. The top layer depth could also be predicted with reasonable accuracy. The proposed method provides a promising approach for uncertainty-aware sub-surface parameter estimation that can enable decision-making for risk assessment across a wide range of applications.