 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Locomotion via Zero-order Stochastic Nonlinear Model Predictive Control with Guard Saltation Matrix
Mar 21, 2024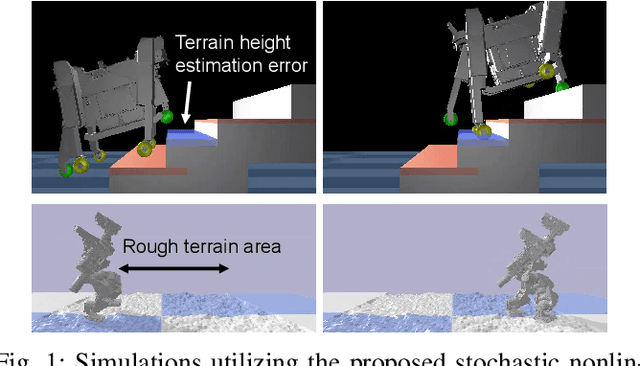
This paper presents a stochastic/robust nonlinear model predictive control (NMPC) to enhance the robustness of legged locomotion against contact uncertainties. We integrate the contact uncertainties into the covariance propagation of stochastic/robust NMPC framework by leveraging the guard saltation matrix and an extended Kalman filter-like covariance update. We achieve fast stochastic/robust NMPC computation by utilizing the zero-order stochastic/robust NMPC algorithm with additional improvements in computational efficiency concerning the feedback gains. We conducted numerical experiments and demonstrate that the proposed method can accurately forecast future state covariance and generate trajectories that satisfies constraints even in the presence of the contact uncertainties. Hardware experiments on the perceptive locomotion of a wheeled-legged robot were also carried out, validating the feasibility of the proposed method in a real-world system with limited on-board computation.
Versatile Telescopic-Wheeled-Legged Locomotion of Tachyon 3 via Full-Centroidal Nonlinear Model Predictive Control
Dec 14, 2023This paper presents a nonlinear model predictive control (NMPC) toward versatile motion generation for the telescopic-wheeled-legged robot Tachyon 3, the unique hardware structure of which poses challenges in control and motion planning. We apply the full-centroidal NMPC formulation with dedicated constraints that can capture the accurate kinematics and dynamics of Tachyon 3. We have developed a control pipeline that includes an internal state integrator to apply NMPC to Tachyon 3, the actuators of which employ high-gain position-controllers. We conducted simulation and hardware experiments on the perceptive locomotion of Tachyon 3 over structured terrains and demonstrated that the proposed method can achieve smooth and dynamic motion generation under harsh physical and environmental constraints.