 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyzing Whole-Body Pose Transitions in Multi-Contact Motions
Sep 30, 2015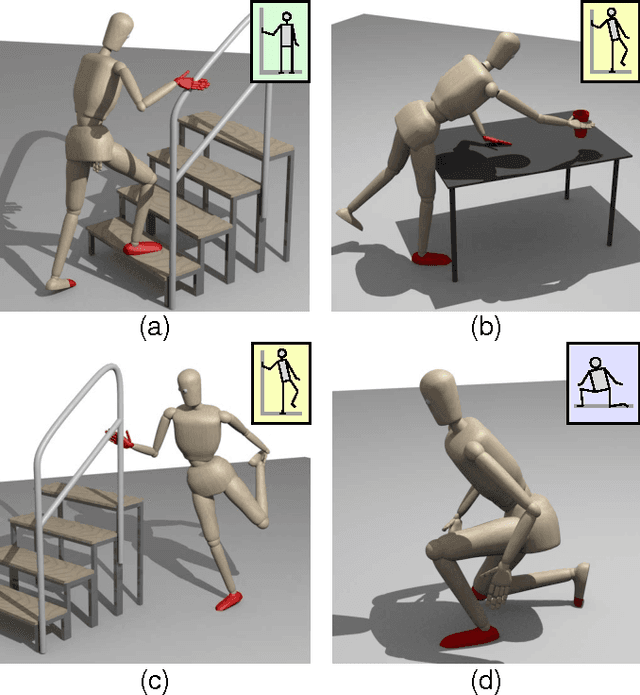

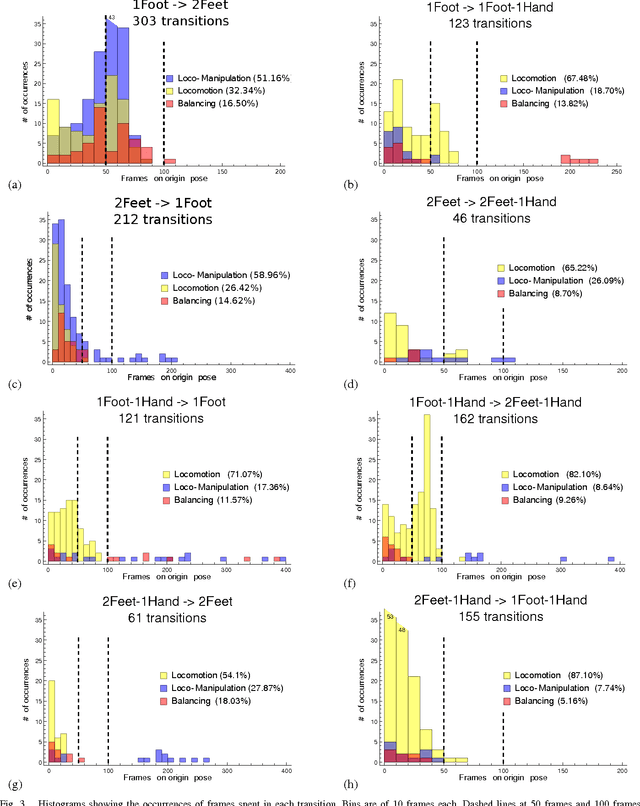
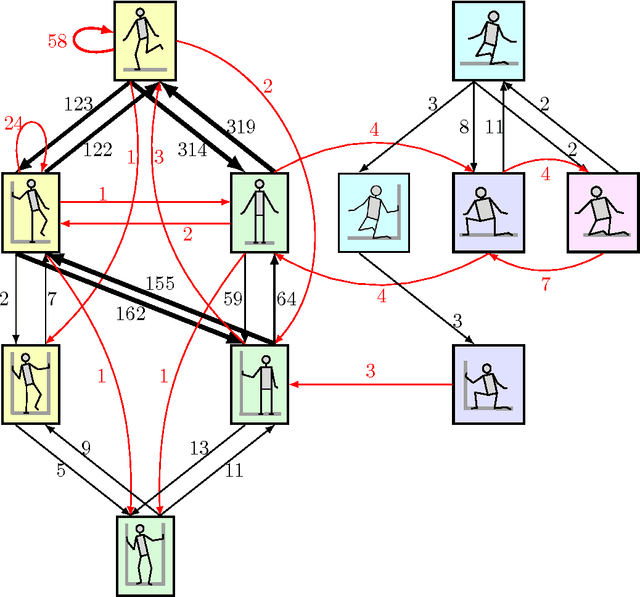
When executing whole-body motions, humans are able to use a large variety of support poses which not only utilize the feet, but also hands, knees and elbows to enhance stability. While there are many works analyzing the transitions involved in walking, very few works analyze human motion where more complex supports occur. In this work, we analyze complex support pose transitions in human motion involving locomotion and manipulation tasks (loco-manipulation). We have applied a method for the detection of human support contacts from motion capture data to a large-scale dataset of loco-manipulation motions involving multi-contact supports, providing a semantic representation of them. Our results provide a statistical analysis of the used support poses, their transitions and the time spent in each of them. In addition, our data partially validates our taxonomy of whole-body support poses presented in our previous work. We believe that this work extends our understanding of human motion for humanoids, with a long-term objective of developing methods for autonomous multi-contact motion planning.