 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning-based Heuristics to Guide Domain-Independent Dynamic Programming
Mar 20, 2025Domain-Independent Dynamic Programming (DIDP) is a state-space search paradigm based on dynamic programming for combinatorial optimization. In its current implementation, DIDP guides the search using user-defined dual bounds. Reinforcement learning (RL) is increasingly being applied to combinatorial optimization problems and shares several key structures with DP, being represented by the Bellman equation and state-based transition systems. We propose using reinforcement learning to obtain a heuristic function to guide the search in DIDP. We develop two RL-based guidance approaches: value-based guidance using Deep Q-Networks and policy-based guidance using Proximal Policy Optimization. Our experiments indicate that RL-based guidance significantly outperforms standard DIDP and problem-specific greedy heuristics with the same number of node expansions. Further, despite longer node evaluation times, RL guidance achieves better run-time performance than standard DIDP on three of four benchmark domains.
Spatially-weighted Anomaly Detection with Regression Model
Mar 28, 2019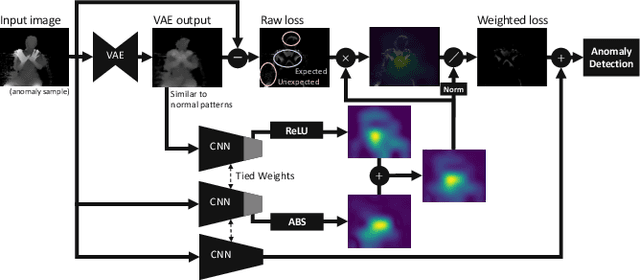
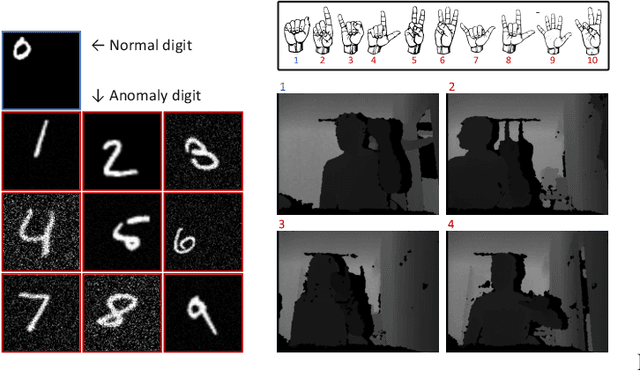
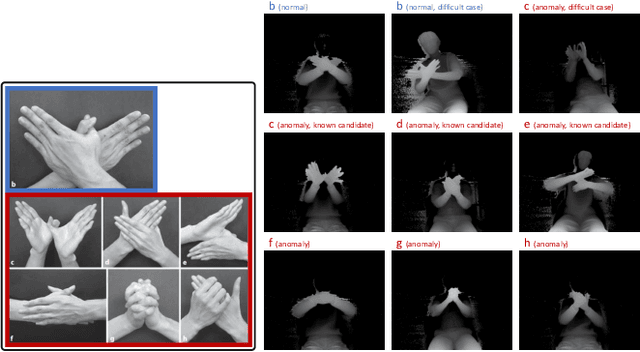
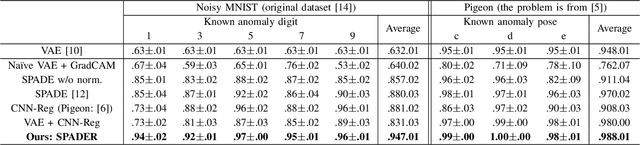
Visual anomaly detection is common in several applications including medical screening and production quality check. Although a definition of the anomaly is an unknown trend in data, in many cases some hints or samples of the anomaly class can be given in advance. Conventional methods cannot use the available anomaly data, and also do not have a robustness of noise. In this paper, we propose a novel spatially-weighted reconstruction-loss-based anomaly detection with a likelihood value from a regression model trained by all known data. The spatial weights are calculated by a region of interest generated from employing visualization of the regression model. We introduce some ways to combine with various strategies to propose a state-of-the-art method. Comparing with other methods on three different datasets, we empirically verify the proposed method performs better than the others.