 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePMNI: Pose-free Multi-view Normal Integration for Reflective and Textureless Surface Reconstruction
Apr 14, 2025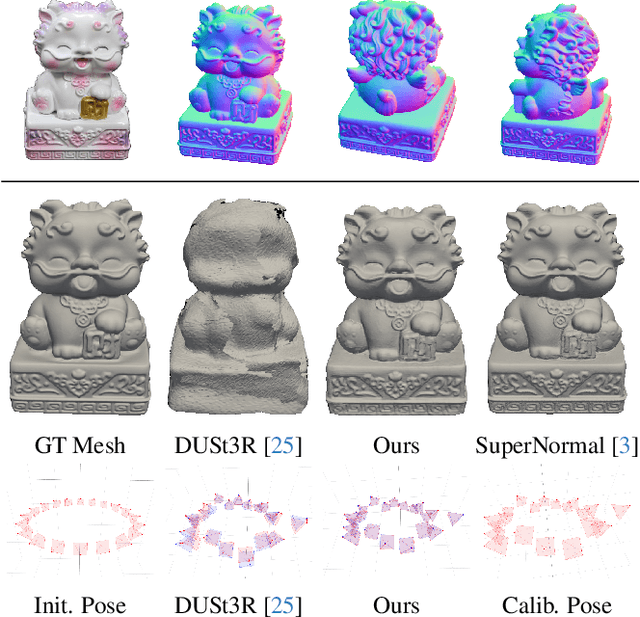

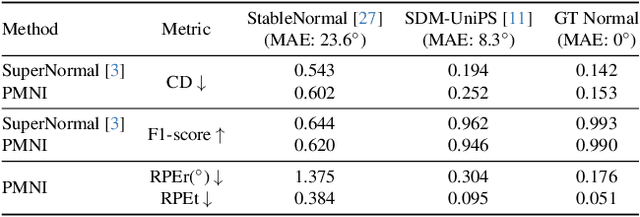

Reflective and textureless surfaces remain a challenge in multi-view 3D reconstruction. Both camera pose calibration and shape reconstruction often fail due to insufficient or unreliable cross-view visual features. To address these issues, we present PMNI (Pose-free Multi-view Normal Integration), a neural surface reconstruction method that incorporates rich geometric information by leveraging surface normal maps instead of RGB images. By enforcing geometric constraints from surface normals and multi-view shape consistency within a neural signed distance function (SDF) optimization framework, PMNI simultaneously recovers accurate camera poses and high-fidelity surface geometry. Experimental results on synthetic and real-world datasets show that our method achieves state-of-the-art performance in the reconstruction of reflective surfaces, even without reliable initial camera poses.