 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comprehensive Review of 3D Object Detection in Autonomous Driving: Technological Advances and Future Directions
Aug 28, 2024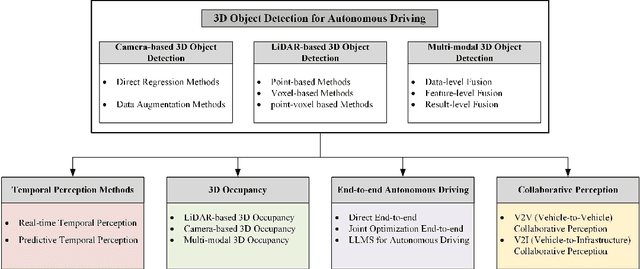


In recent years, 3D object perception has become a crucial component in the development of autonomous driving systems, providing essential environmental awareness. However, as perception tasks in autonomous driving evolve, their variants have increased, leading to diverse insights from industry and academia. Currently, there is a lack of comprehensive surveys that collect and summarize these perception tasks and their developments from a broader perspective. This review extensively summarizes traditional 3D object detection methods, focusing on camera-based, LiDAR-based, and fusion detection techniques. We provide a comprehensive analysis of the strengths and limitations of each approach, highlighting advancements in accuracy and robustness. Furthermore, we discuss future directions, including methods to improve accuracy such as temporal perception, occupancy grids, and end-to-end learning frameworks. We also explore cooperative perception methods that extend the perception range through collaborative communication. By providing a holistic view of the current state and future developments in 3D object perception, we aim to offer a more comprehensive understanding of perception tasks for autonomous driving. Additionally, we have established an active repository to provide continuous updates on the latest advancements in this field, accessible at: https://github.com/Fishsoup0/Autonomous-Driving-Perception.