 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Learning of Kalman Filtering: From Output to State Estimation
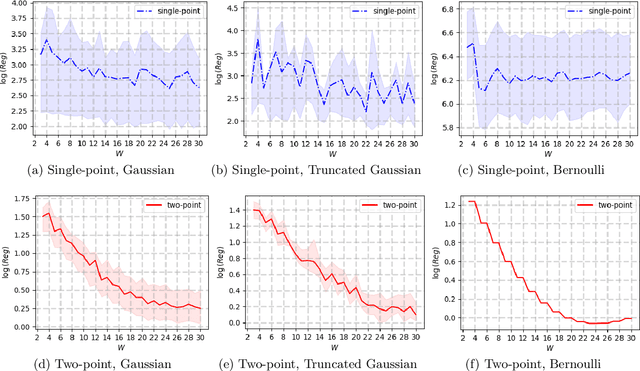
Mar 28, 2026In this paper, we study the problem of learning Kalman filtering with unknown system model in partially observed linear dynamical systems. We propose a unified algorithmic framework based on online optimization that can be used to solve both the output estimation and state estimation scenarios. By exploring the properties of the estimation error cost functions, such as conditionally strong convexity, we show that our algorithm achieves a $\log T$-regret in the horizon length $T$ for the output estimation scenario. More importantly, we tackle the more challenging scenario of learning Kalman filtering for state estimation, which is an open problem in the literature. We first characterize a fundamental limitation of the problem, demonstrating the impossibility of any algorithm to achieve sublinear regret in $T$. By further introducing a random query scheme into our algorithm, we show that a $\sqrt{T}$-regret is achievable when rendering the algorithm limited query access to more informative measurements of the system state in practice. Our algorithm and regret readily capture the trade-off between the number of queries and the achieved regret, and shed light on online learning problems with limited observations. We validate the performance of our algorithms using numerical examples.
Model-Free Output Feedback Stabilization via Policy Gradient Methods
Jan 29, 2026Stabilizing a dynamical system is a fundamental problem that serves as a cornerstone for many complex tasks in the field of control systems. The problem becomes challenging when the system model is unknown. Among the Reinforcement Learning (RL) algorithms that have been successfully applied to solve problems pertaining to unknown linear dynamical systems, the policy gradient (PG) method stands out due to its ease of implementation and can solve the problem in a model-free manner. However, most of the existing works on PG methods for unknown linear dynamical systems assume full-state feedback. In this paper, we take a step towards model-free learning for partially observable linear dynamical systems with output feedback and focus on the fundamental stabilization problem of the system. We propose an algorithmic framework that stretches the boundary of PG methods to the problem without global convergence guarantees. We show that by leveraging zeroth-order PG update based on system trajectories and its convergence to stationary points, the proposed algorithms return a stabilizing output feedback policy for discrete-time linear dynamical systems. We also explicitly characterize the sample complexity of our algorithm and verify the effectiveness of the algorithm using numerical examples.
Output Feedback Stabilization of Linear Systems via Policy Gradient Methods
Jan 27, 2026Stabilizing a dynamical system is a fundamental problem that serves as a cornerstone for many complex tasks in the field of control systems. The problem becomes challenging when the system model is unknown. Among the Reinforcement Learning (RL) algorithms that have been successfully applied to solve problems pertaining to unknown linear dynamical systems, the policy gradient (PG) method stands out due to its ease of implementation and can solve the problem in a model-free manner. However, most of the existing works on PG methods for unknown linear dynamical systems assume full-state feedback. In this paper, we take a step towards model-free learning for partially observable linear dynamical systems with output feedback and focus on the fundamental stabilization problem of the system. We propose an algorithmic framework that stretches the boundary of PG methods to the problem without global convergence guarantees. We show that by leveraging zeroth-order PG update based on system trajectories and its convergence to stationary points, the proposed algorithms return a stabilizing output feedback policy for discrete-time linear dynamical systems. We also explicitly characterize the sample complexity of our algorithm and verify the effectiveness of the algorithm using numerical examples.
Online Convex Optimization with Memory and Limited Predictions
Oct 31, 2024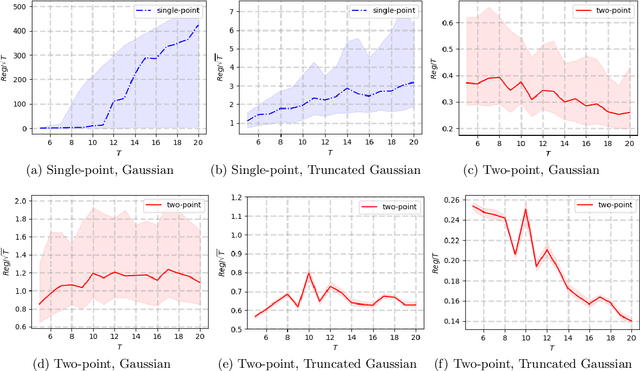
We study the problem of online convex optimization with memory and predictions over a horizon $T$. At each time step, a decision maker is given some limited predictions of the cost functions from a finite window of future time steps, i.e., values of the cost function at certain decision points in the future. The decision maker then chooses an action and incurs a cost given by a convex function that depends on the actions chosen in the past. We propose an algorithm to solve this problem and show that the dynamic regret of the algorithm decays exponentially with the prediction window length. Our algorithm contains two general subroutines that work for wider classes of problems. The first subroutine can solve general online convex optimization with memory and bandit feedback with $\sqrt{T}$-dynamic regret with respect to $T$. The second subroutine is a zeroth-order method that can be used to solve general convex optimization problems with a linear convergence rate that matches the best achievable rate of first-order methods for convex optimization. The key to our algorithm design and analysis is the use of truncated Gaussian smoothing when querying the decision points for obtaining the predictions. We complement our theoretical results using numerical experiments.
Regret Bounds for Learning Decentralized Linear Quadratic Regulator with Partially Nested Information Structure
Oct 17, 2022
We study the problem of learning decentralized linear quadratic regulator under a partially nested information constraint, when the system model is unknown a priori. We propose an online learning algorithm that adaptively designs a control policy as new data samples from a single system trajectory become available. Our algorithm design uses a disturbance-feedback representation of state-feedback controllers coupled with online convex optimization with memory and delayed feedback. We show that our online algorithm yields a controller that satisfies the desired information constraint and enjoys an expected regret that scales as $\sqrt{T}$ with the time horizon $T$.