 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Planning Using Probabilistic Hyperproperties
Feb 19, 2025Multi-agent planning under stochastic dynamics is usually formalised using decentralized (partially observable) Markov decision processes ( MDPs) and reachability or expected reward specifications. In this paper, we propose a different approach: we use an MDP describing how a single agent operates in an environment and probabilistic hyperproperties to capture desired temporal objectives for a set of decentralized agents operating in the environment. We extend existing approaches for model checking probabilistic hyperproperties to handle temporal formulae relating paths of different agents, thus requiring the self-composition between multiple MDPs. Using several case studies, we demonstrate that our approach provides a flexible and expressive framework to broaden the specification capabilities with respect to existing planning techniques. Additionally, we establish a close connection between a subclass of probabilistic hyperproperties and planning for a particular type of Dec-MDPs, for both of which we show undecidability. This lays the ground for the use of existing decentralized planning tools in the field of probabilistic hyperproperty verification.
Counterexample-Driven Synthesis for Probabilistic Program Sketches
Apr 28, 2019

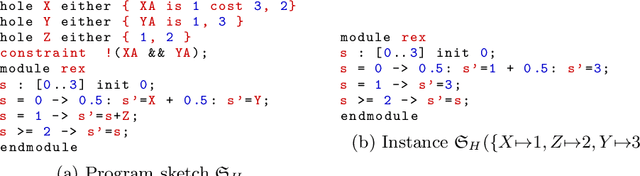
Probabilistic programs are key to deal with uncertainty in e.g. controller synthesis. They are typically small but intricate. Their development is complex and error prone requiring quantitative reasoning over a myriad of alternative designs. To mitigate this complexity, we adopt counterexample-guided inductive synthesis (CEGIS) to automatically synthesise finite-state probabilistic programs. Our approach leverages efficient model checking, modern SMT solving, and counterexample generation at program level. Experiments on practically relevant case studies show that design spaces with millions of candidate designs can be fully explored using a few thousand verification queries.