 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Planning Using Probabilistic Hyperproperties
Feb 19, 2025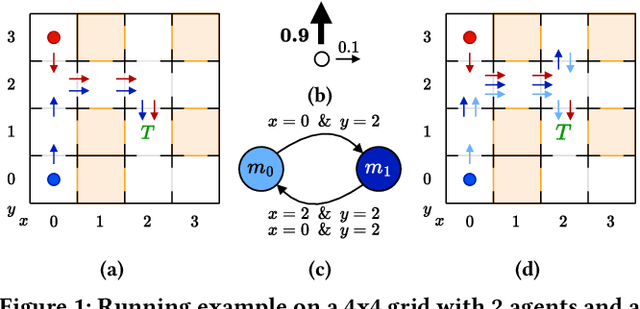
Multi-agent planning under stochastic dynamics is usually formalised using decentralized (partially observable) Markov decision processes ( MDPs) and reachability or expected reward specifications. In this paper, we propose a different approach: we use an MDP describing how a single agent operates in an environment and probabilistic hyperproperties to capture desired temporal objectives for a set of decentralized agents operating in the environment. We extend existing approaches for model checking probabilistic hyperproperties to handle temporal formulae relating paths of different agents, thus requiring the self-composition between multiple MDPs. Using several case studies, we demonstrate that our approach provides a flexible and expressive framework to broaden the specification capabilities with respect to existing planning techniques. Additionally, we establish a close connection between a subclass of probabilistic hyperproperties and planning for a particular type of Dec-MDPs, for both of which we show undecidability. This lays the ground for the use of existing decentralized planning tools in the field of probabilistic hyperproperty verification.
Deductive Controller Synthesis for Probabilistic Hyperproperties
Jul 10, 2023Probabilistic hyperproperties specify quantitative relations between the probabilities of reaching different target sets of states from different initial sets of states. This class of behavioral properties is suitable for capturing important security, privacy, and system-level requirements. We propose a new approach to solve the controller synthesis problem for Markov decision processes (MDPs) and probabilistic hyperproperties. Our specification language builds on top of the logic HyperPCTL and enhances it with structural constraints over the synthesized controllers. Our approach starts from a family of controllers represented symbolically and defined over the same copy of an MDP. We then introduce an abstraction refinement strategy that can relate multiple computation trees and that we employ to prune the search space deductively. The experimental evaluation demonstrates that the proposed approach considerably outperforms HyperProb, a state-of-the-art SMT-based model checking tool for HyperPCTL. Moreover, our approach is the first one that is able to effectively combine probabilistic hyperproperties with additional intra-controller constraints (e.g. partial observability) as well as inter-controller constraints (e.g. agreements on a common action).