 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgen-MeRCI: A new Metric to Evaluate the Correlation Between Predictive Uncertainty and True Error
Aug 20, 2019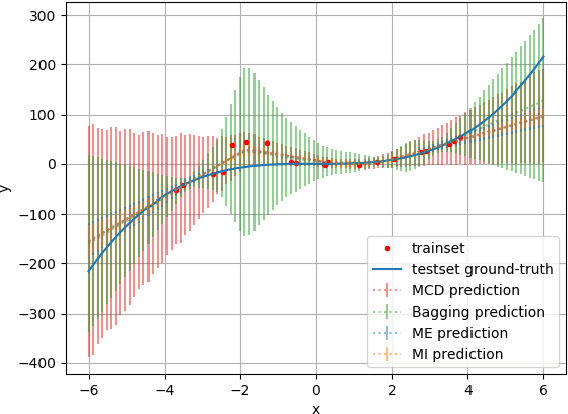


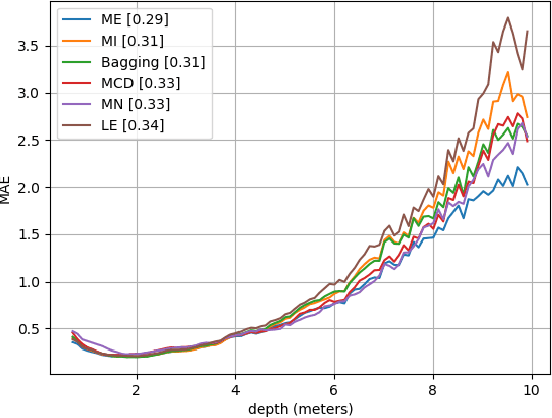
As deep learning applications are becoming more and more pervasive in robotics, the question of evaluating the reliability of inferences becomes a central question in the robotics community. This domain, known as predictive uncertainty, has come under the scrutiny of research groups developing Bayesian approaches adapted to deep learning such as Monte Carlo Dropout. Unfortunately, for the time being, the real goal of predictive uncertainty has been swept under the rug. Indeed, these approaches are solely evaluated in terms of raw performance of the network prediction, while the quality of their estimated uncertainty is not assessed. Evaluating such uncertainty prediction quality is especially important in robotics, as actions shall depend on the confidence in perceived information. In this context, the main contribution of this article is to propose a novel metric that is adapted to the evaluation of relative uncertainty assessment and directly applicable to regression with deep neural networks. To experimentally validate this metric, we evaluate it on a toy dataset and then apply it to the task of monocular depth estimation.
Deep multi-scale architectures for monocular depth estimation
Jun 08, 2018
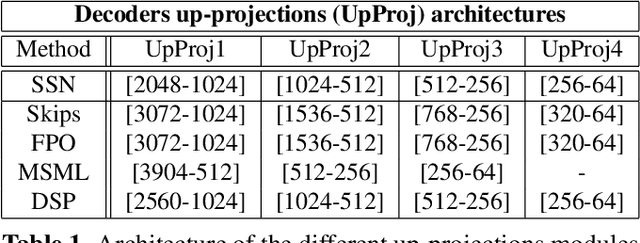
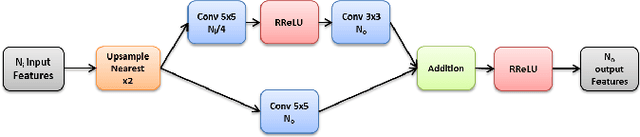

This paper aims at understanding the role of multi-scale information in the estimation of depth from monocular images. More precisely, the paper investigates four different deep CNN architectures, designed to explicitly make use of multi-scale features along the network, and compare them to a state-of-the-art single-scale approach. The paper also shows that involving multi-scale features in depth estimation not only improves the performance in terms of accuracy, but also gives qualitatively better depth maps. Experiments are done on the widely used NYU Depth dataset, on which the proposed method achieves state-of-the-art performance.