 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximate LSTMs for Time-Constrained Inference: Enabling Fast Reaction in Self-Driving Cars
May 02, 2019


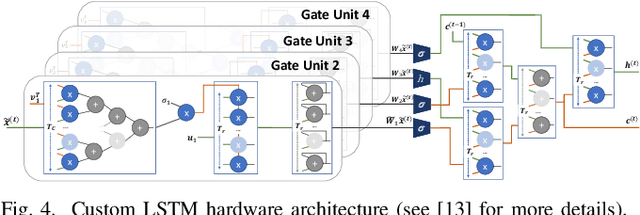
The need to recognise long-term dependencies in sequential data such as video streams has made LSTMs a prominent AI model for many emerging applications. However, the high computational and memory demands of LSTMs introduce challenges in their deployment on latency-critical systems such as self-driving cars which are equipped with limited computational resources on-board. In this paper, we introduce an approximate computing scheme combining model pruning and computation restructuring to obtain a high-accuracy approximation of the result in early stages of the computation. Our experiments demonstrate that using the proposed methodology, mission-critical systems responsible for autonomous navigation and collision avoidance are able to make informed decisions based on approximate calculations within the available time budget, meeting their specifications on safety and robustness.