 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Analysis of Human-Robot Information Streams to Inform Dynamic Autonomy Allocation
Aug 03, 2021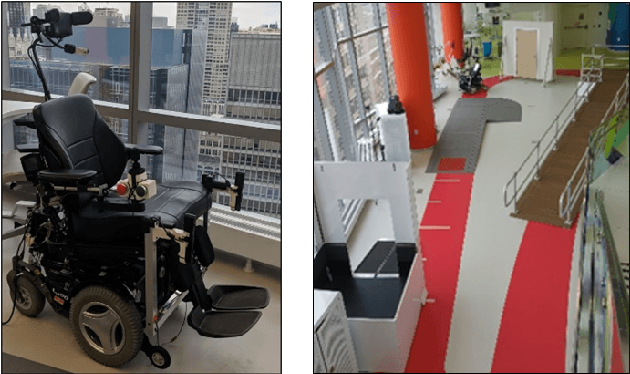
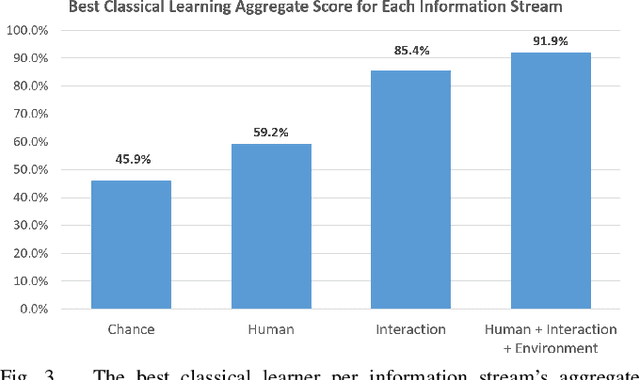
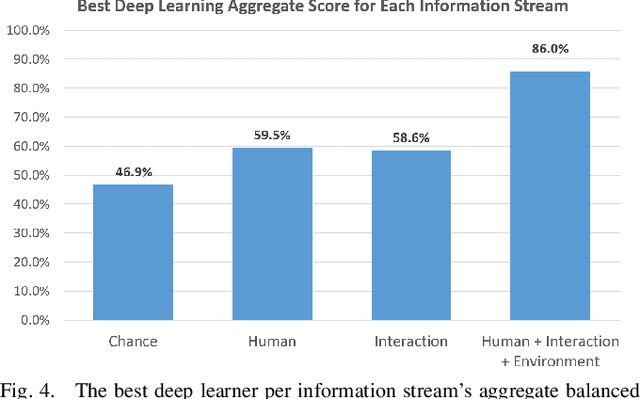
A dynamic autonomy allocation framework automatically shifts how much control lies with the human versus the robotics autonomy, for example based on factors such as environmental safety or user preference. To investigate the question of which factors should drive dynamic autonomy allocation, we perform a human subject study to collect ground truth data that shifts between levels of autonomy during shared-control robot operation. Information streams from the human, the interaction between the human and the robot, and the environment are analyzed. Machine learning methods -- both classical and deep learning -- are trained on this data. An analysis of information streams from the human-robot team suggests features which capture the interaction between the human and the robotics autonomy are the most informative in predicting when to shift autonomy levels. Even the addition of data from the environment does little to improve upon this predictive power. The features learned by deep networks, in comparison to the hand-engineered features, prove variable in their ability to represent shift-relevant information. This work demonstrates the classification power of human-only and human-robot interaction information streams for use in the design of shared-control frameworks, and provides insights into the comparative utility of various data streams and methods to extract shift-relevant information from those data.
Large-Scale Learning with Less RAM via Randomization
Mar 19, 2013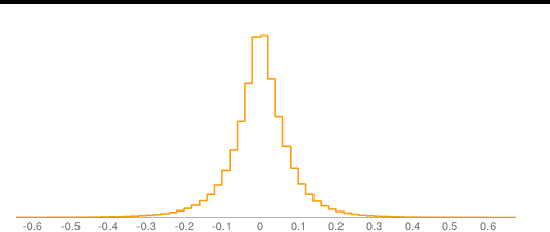
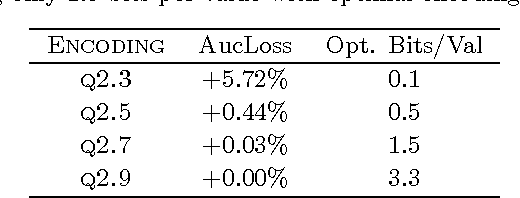
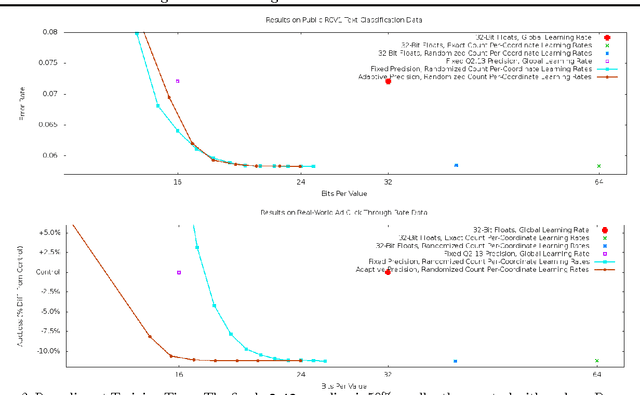
We reduce the memory footprint of popular large-scale online learning methods by projecting our weight vector onto a coarse discrete set using randomized rounding. Compared to standard 32-bit float encodings, this reduces RAM usage by more than 50% during training and by up to 95% when making predictions from a fixed model, with almost no loss in accuracy. We also show that randomized counting can be used to implement per-coordinate learning rates, improving model quality with little additional RAM. We prove these memory-saving methods achieve regret guarantees similar to their exact variants. Empirical evaluation confirms excellent performance, dominating standard approaches across memory versus accuracy tradeoffs.