 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelax, it doesn't matter how you get there: A new self-supervised approach for multi-timescale behavior analysis
Mar 15, 2023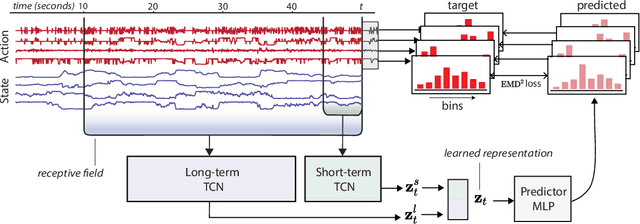

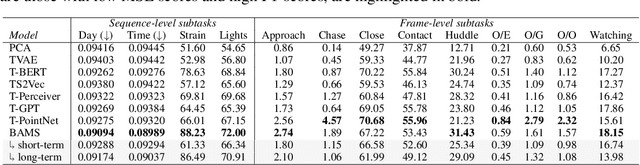
Natural behavior consists of dynamics that are complex and unpredictable, especially when trying to predict many steps into the future. While some success has been found in building representations of behavior under constrained or simplified task-based conditions, many of these models cannot be applied to free and naturalistic settings where behavior becomes increasingly hard to model. In this work, we develop a multi-task representation learning model for behavior that combines two novel components: (i) An action prediction objective that aims to predict the distribution of actions over future timesteps, and (ii) A multi-scale architecture that builds separate latent spaces to accommodate short- and long-term dynamics. After demonstrating the ability of the method to build representations of both local and global dynamics in realistic robots in varying environments and terrains, we apply our method to the MABe 2022 Multi-agent behavior challenge, where our model ranks 1st overall and on all global tasks, and 1st or 2nd on 7 out of 9 frame-level tasks. In all of these cases, we show that our model can build representations that capture the many different factors that drive behavior and solve a wide range of downstream tasks.
Learning Behavior Representations Through Multi-Timescale Bootstrapping
Jun 14, 2022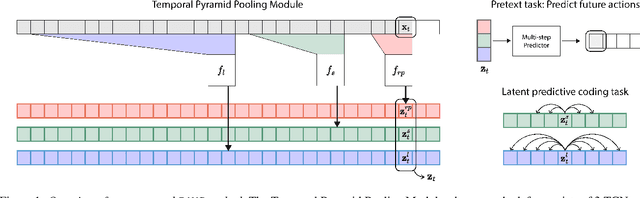
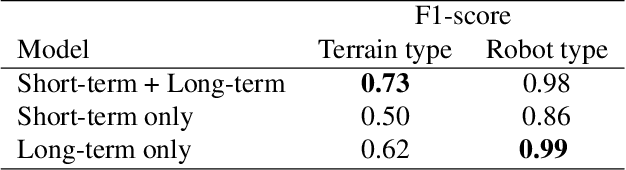
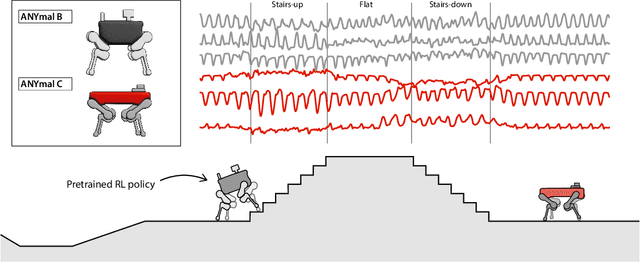
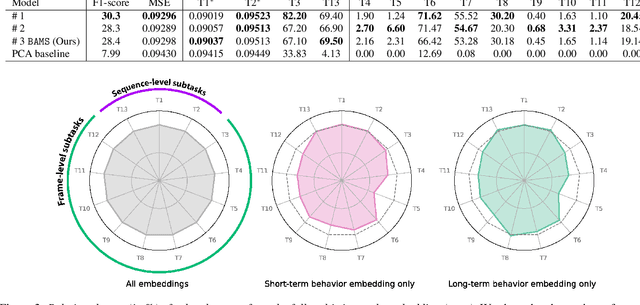
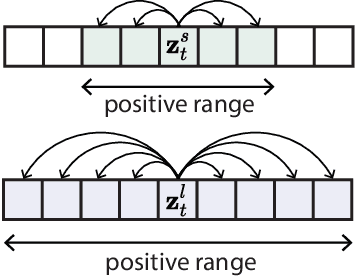
Natural behavior consists of dynamics that are both unpredictable, can switch suddenly, and unfold over many different timescales. While some success has been found in building representations of behavior under constrained or simplified task-based conditions, many of these models cannot be applied to free and naturalistic settings due to the fact that they assume a single scale of temporal dynamics. In this work, we introduce Bootstrap Across Multiple Scales (BAMS), a multi-scale representation learning model for behavior: we combine a pooling module that aggregates features extracted over encoders with different temporal receptive fields, and design a set of latent objectives to bootstrap the representations in each respective space to encourage disentanglement across different timescales. We first apply our method on a dataset of quadrupeds navigating in different terrain types, and show that our model captures the temporal complexity of behavior. We then apply our method to the MABe 2022 Multi-agent behavior challenge, where our model ranks 3rd overall and 1st on two subtasks, and show the importance of incorporating multi-timescales when analyzing behavior.
Debiasing Methods in Natural Language Understanding Make Bias More Accessible
Sep 09, 2021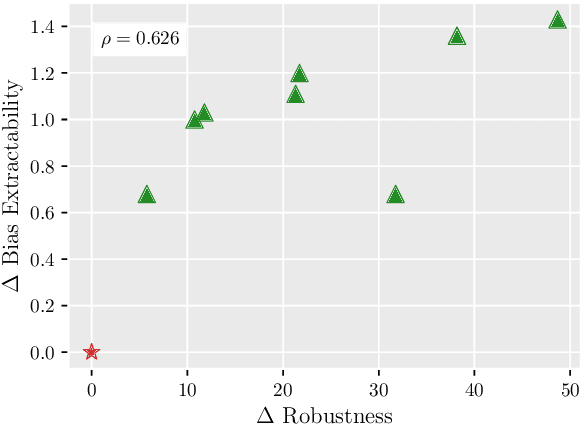


Model robustness to bias is often determined by the generalization on carefully designed out-of-distribution datasets. Recent debiasing methods in natural language understanding (NLU) improve performance on such datasets by pressuring models into making unbiased predictions. An underlying assumption behind such methods is that this also leads to the discovery of more robust features in the model's inner representations. We propose a general probing-based framework that allows for post-hoc interpretation of biases in language models, and use an information-theoretic approach to measure the extractability of certain biases from the model's representations. We experiment with several NLU datasets and known biases, and show that, counter-intuitively, the more a language model is pushed towards a debiased regime, the more bias is actually encoded in its inner representations.