 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemRaFiner: Panoptic Segmentation in Sparse and Noisy Radar Point Clouds
Jul 09, 2025Semantic scene understanding, including the perception and classification of moving agents, is essential to enabling safe and robust driving behaviours of autonomous vehicles. Cameras and LiDARs are commonly used for semantic scene understanding. However, both sensor modalities face limitations in adverse weather and usually do not provide motion information. Radar sensors overcome these limitations and directly offer information about moving agents by measuring the Doppler velocity, but the measurements are comparably sparse and noisy. In this paper, we address the problem of panoptic segmentation in sparse radar point clouds to enhance scene understanding. Our approach, called SemRaFiner, accounts for changing density in sparse radar point clouds and optimizes the feature extraction to improve accuracy. Furthermore, we propose an optimized training procedure to refine instance assignments by incorporating a dedicated data augmentation. Our experiments suggest that our approach outperforms state-of-the-art methods for radar-based panoptic segmentation.
Radar Instance Transformer: Reliable Moving Instance Segmentation in Sparse Radar Point Clouds
Sep 28, 2023



The perception of moving objects is crucial for autonomous robots performing collision avoidance in dynamic environments. LiDARs and cameras tremendously enhance scene interpretation but do not provide direct motion information and face limitations under adverse weather. Radar sensors overcome these limitations and provide Doppler velocities, delivering direct information on dynamic objects. In this paper, we address the problem of moving instance segmentation in radar point clouds to enhance scene interpretation for safety-critical tasks. Our Radar Instance Transformer enriches the current radar scan with temporal information without passing aggregated scans through a neural network. We propose a full-resolution backbone to prevent information loss in sparse point cloud processing. Our instance transformer head incorporates essential information to enhance segmentation but also enables reliable, class-agnostic instance assignments. In sum, our approach shows superior performance on the new moving instance segmentation benchmarks, including diverse environments, and provides model-agnostic modules to enhance scene interpretation. The benchmark is based on the RadarScenes dataset and will be made available upon acceptance.
Gaussian Radar Transformer for Semantic Segmentation in Noisy Radar Data
Dec 07, 2022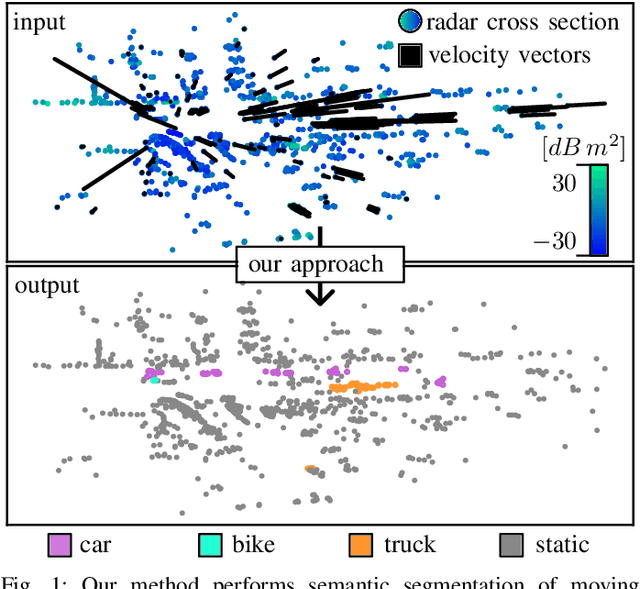

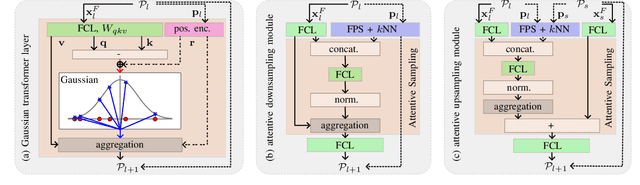
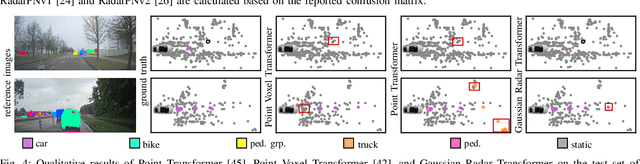
Scene understanding is crucial for autonomous robots in dynamic environments for making future state predictions, avoiding collisions, and path planning. Camera and LiDAR perception made tremendous progress in recent years, but face limitations under adverse weather conditions. To leverage the full potential of multi-modal sensor suites, radar sensors are essential for safety critical tasks and are already installed in most new vehicles today. In this paper, we address the problem of semantic segmentation of moving objects in radar point clouds to enhance the perception of the environment with another sensor modality. Instead of aggregating multiple scans to densify the point clouds, we propose a novel approach based on the self-attention mechanism to accurately perform sparse, single-scan segmentation. Our approach, called Gaussian Radar Transformer, includes the newly introduced Gaussian transformer layer, which replaces the softmax normalization by a Gaussian function to decouple the contribution of individual points. To tackle the challenge of the transformer to capture long-range dependencies, we propose our attentive up- and downsampling modules to enlarge the receptive field and capture strong spatial relations. We compare our approach to other state-of-the-art methods on the RadarScenes data set and show superior segmentation quality in diverse environments, even without exploiting temporal information.