 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePairwise is Not Enough: Hypergraph Neural Networks for Multi-Agent Pathfinding
Feb 06, 2026Multi-Agent Path Finding (MAPF) is a representative multi-agent coordination problem, where multiple agents are required to navigate to their respective goals without collisions. Solving MAPF optimally is known to be NP-hard, leading to the adoption of learning-based approaches to alleviate the online computational burden. Prevailing approaches, such as Graph Neural Networks (GNNs), are typically constrained to pairwise message passing between agents. However, this limitation leads to suboptimal behaviours and critical issues, such as attention dilution, particularly in dense environments where group (i.e. beyond just two agents) coordination is most critical. Despite the importance of such higher-order interactions, existing approaches have not been able to fully explore them. To address this representational bottleneck, we introduce HMAGAT (Hypergraph Multi-Agent Attention Network), a novel architecture that leverages attentional mechanisms over directed hypergraphs to explicitly capture group dynamics. Empirically, HMAGAT establishes a new state-of-the-art among learning-based MAPF solvers: e.g., despite having just 1M parameters and being trained on 100$\times$ less data, it outperforms the current SoTA 85M parameter model. Through detailed analysis of HMAGAT's attention values, we demonstrate how hypergraph representations mitigate the attention dilution inherent in GNNs and capture complex interactions where pairwise methods fail. Our results illustrate that appropriate inductive biases are often more critical than the training data size or sheer parameter count for multi-agent problems.
Remotely Detectable Robot Policy Watermarking
Dec 17, 2025The success of machine learning for real-world robotic systems has created a new form of intellectual property: the trained policy. This raises a critical need for novel methods that verify ownership and detect unauthorized, possibly unsafe misuse. While watermarking is established in other domains, physical policies present a unique challenge: remote detection. Existing methods assume access to the robot's internal state, but auditors are often limited to external observations (e.g., video footage). This ``Physical Observation Gap'' means the watermark must be detected from signals that are noisy, asynchronous, and filtered by unknown system dynamics. We formalize this challenge using the concept of a \textit{glimpse sequence}, and introduce Colored Noise Coherency (CoNoCo), the first watermarking strategy designed for remote detection. CoNoCo embeds a spectral signal into the robot's motions by leveraging the policy's inherent stochasticity. To show it does not degrade performance, we prove CoNoCo preserves the marginal action distribution. Our experiments demonstrate strong, robust detection across various remote modalities, including motion capture and side-way/top-down video footage, in both simulated and real-world robot experiments. This work provides a necessary step toward protecting intellectual property in robotics, offering the first method for validating the provenance of physical policies non-invasively, using purely remote observations.
When Is Diversity Rewarded in Cooperative Multi-Agent Learning?
Jun 11, 2025The success of teams in robotics, nature, and society often depends on the division of labor among diverse specialists; however, a principled explanation for when such diversity surpasses a homogeneous team is still missing. Focusing on multi-agent task allocation problems, our goal is to study this question from the perspective of reward design: what kinds of objectives are best suited for heterogeneous teams? We first consider an instantaneous, non-spatial setting where the global reward is built by two generalized aggregation operators: an inner operator that maps the $N$ agents' effort allocations on individual tasks to a task score, and an outer operator that merges the $M$ task scores into the global team reward. We prove that the curvature of these operators determines whether heterogeneity can increase reward, and that for broad reward families this collapses to a simple convexity test. Next, we ask what incentivizes heterogeneity to emerge when embodied, time-extended agents must learn an effort allocation policy. To study heterogeneity in such settings, we use multi-agent reinforcement learning (MARL) as our computational paradigm, and introduce Heterogeneous Environment Design (HED), a gradient-based algorithm that optimizes the parameter space of underspecified MARL environments to find scenarios where heterogeneity is advantageous. Experiments in matrix games and an embodied Multi-Goal-Capture environment show that, despite the difference in settings, HED rediscovers the reward regimes predicted by our theory to maximize the advantage of heterogeneity, both validating HED and connecting our theoretical insights to reward design in MARL. Together, these results help us understand when behavioral diversity delivers a measurable benefit.
Time, Travel, and Energy in the Uniform Dispersion Problem
Apr 30, 2024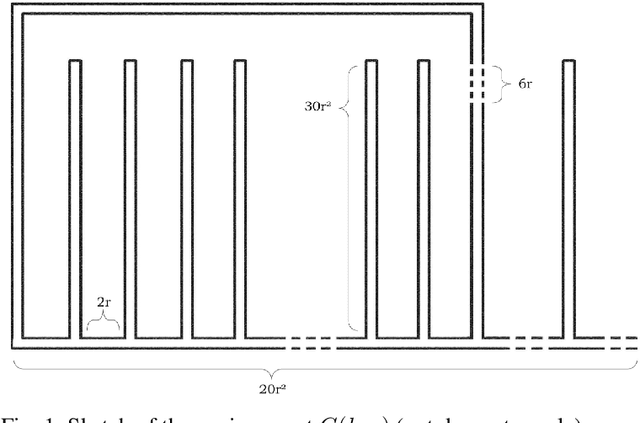
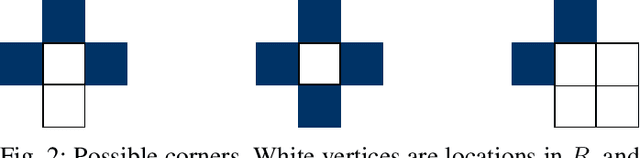
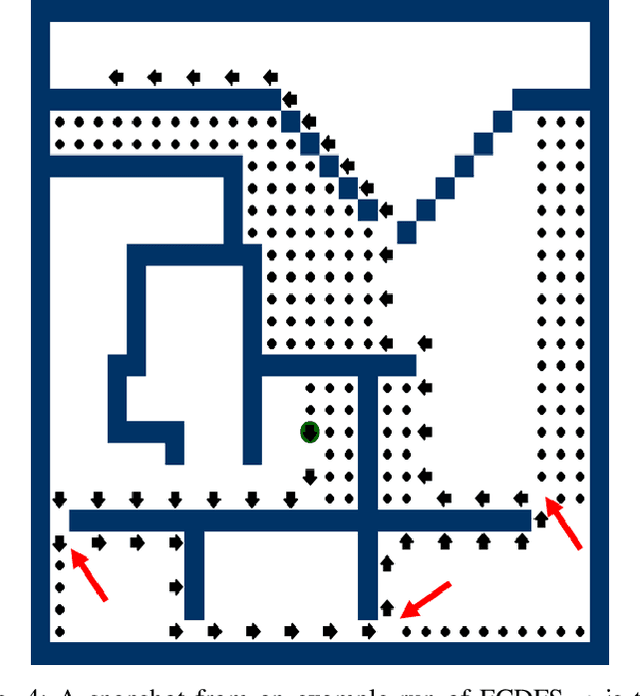
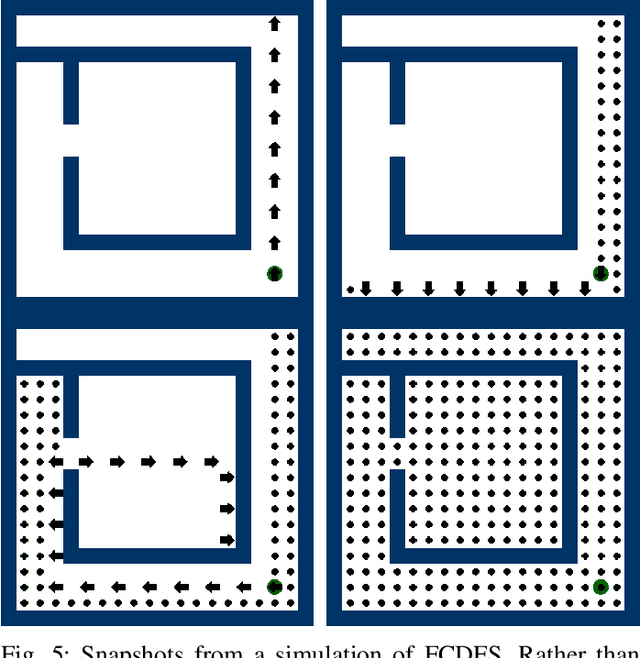
We investigate the algorithmic problem of uniformly dispersing a swarm of robots in an unknown, gridlike environment. In this setting, our goal is to comprehensively study the relationships between performance metrics and robot capabilities. We introduce a formal model comparing dispersion algorithms based on makespan, traveled distance, energy consumption, sensing, communication, and memory. Using this framework, we classify several uniform dispersion algorithms according to their capability requirements and performance. We prove that while makespan and travel can be minimized in all environments, energy cannot, as long as the swarm's sensing range is bounded. In contrast, we show that energy can be minimized even by simple, ``ant-like" robots in synchronous settings and asymptotically minimized in asynchronous settings, provided the environment is topologically simply connected. Our findings offer insights into fundamental limitations that arise when designing swarm robotics systems for exploring unknown environments, highlighting the impact of environment's topology on the feasibility of energy-efficient dispersion.
Patrolling Grids with a Bit of Memory
Jul 18, 2023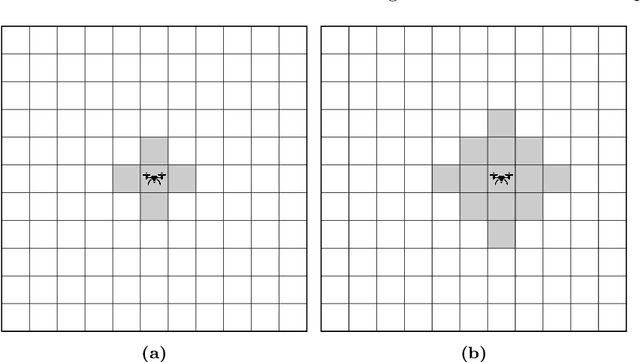
We study the following problem in elementary robotics: can a mobile agent with $b$ bits of memory, which is able to sense only locations at Manhattan distance $V$ or less from itself, patrol a $d$-dimensional grid graph? We show that it is impossible to patrol some grid graphs with $0$ bits of memory, regardless of $V$, and give an exact characterization of those grid graphs that can be patrolled with $0$ bits of memory and visibility range $V$. On the other hand, we show that, surprisingly, an algorithm exists using $1$ bit of memory and $V=1$ that patrols any $d$-dimensional grid graph.
Probabilistic Pursuits on Graphs
Oct 29, 2017
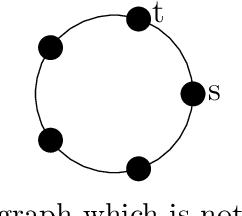

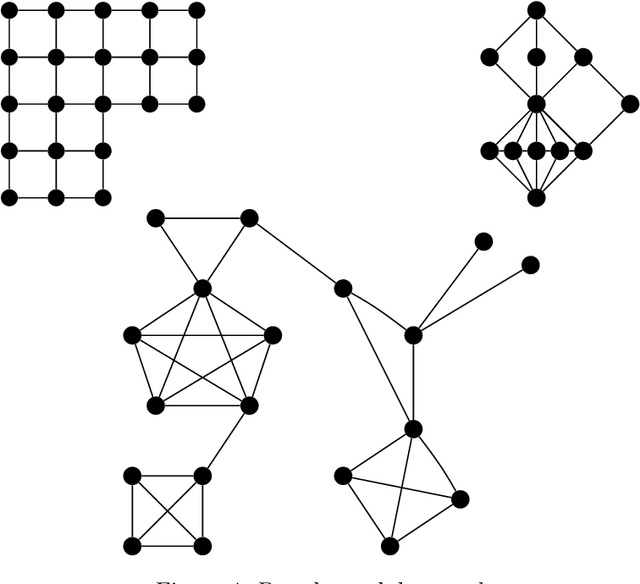
We consider discrete dynamical systems of "ant-like" agents engaged in a sequence of pursuits on a graph environment. The agents emerge one by one at equal time intervals from a source vertex $s$ and pursue each other by greedily attempting to close the distance to their immediate predecessor, the agent that emerged just before them from $s$, until they arrive at the destination point $t$. Such pursuits have been investigated before in the continuous setting and in discrete time when the underlying environment is a regular grid. In both these settings the agents' walks provably converge to a shortest path from $s$ to $t$. Furthermore, assuming a certain natural probability distribution over the move choices of the agents on the grid (in case there are multiple shortest paths between an agent and its predecessor), the walks converge to the uniform distribution over all shortest paths from $s$ to $t$. We study the evolution of agent walks over a general finite graph environment $G$. Our model is a natural generalization of the pursuit rule proposed for the case of the grid. The main results are as follows. We show that "convergence" to the shortest paths in the sense of previous work extends to all pseudo-modular graphs (i.e. graphs in which every three pairwise intersecting disks have a nonempty intersection), and also to environments obtained by taking graph products, generalizing previous results in two different ways. We show that convergence to the shortest paths is also obtained by chordal graphs, and discuss some further positive and negative results for planar graphs. In the most general case, convergence to the shortest paths is not guaranteed, and the agents may get stuck on sets of recurrent, non-optimal walks from $s$ to $t$. However, we show that the limiting distributions of the agents' walks will always be uniform distributions over some set of walks of equal length.