 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGECCO: Geometrically-Conditioned Point Diffusion Models
Mar 10, 2023Diffusion models generating images conditionally on text, such as Dall-E 2 and Stable Diffusion, have recently made a splash far beyond the computer vision community. Here, we tackle the related problem of generating point clouds, both unconditionally, and conditionally with images. For the latter, we introduce a novel geometrically-motivated conditioning scheme based on projecting sparse image features into the point cloud and attaching them to each individual point, at every step in the denoising process. This approach improves geometric consistency and yields greater fidelity than current methods relying on unstructured, global latent codes. Additionally, we show how to apply recent continuous-time diffusion schemes. Our method performs on par or above the state of art on conditional and unconditional experiments on synthetic data, while being faster, lighter, and delivering tractable likelihoods. We show it can also scale to diverse indoors scenes.
RayTran: 3D pose estimation and shape reconstruction of multiple objects from videos with ray-traced transformers
Mar 24, 2022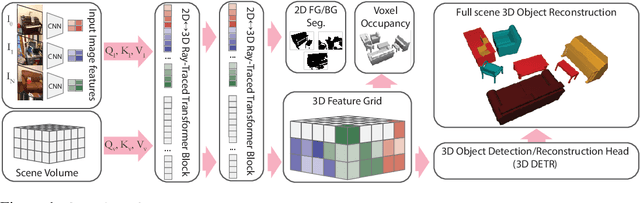
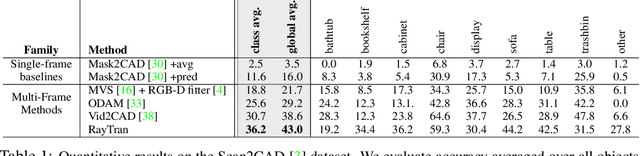
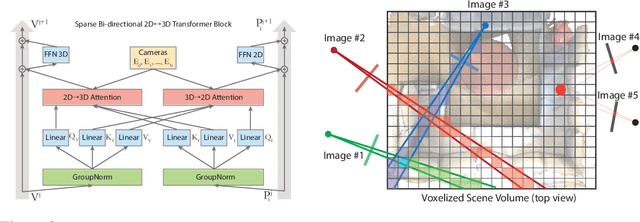
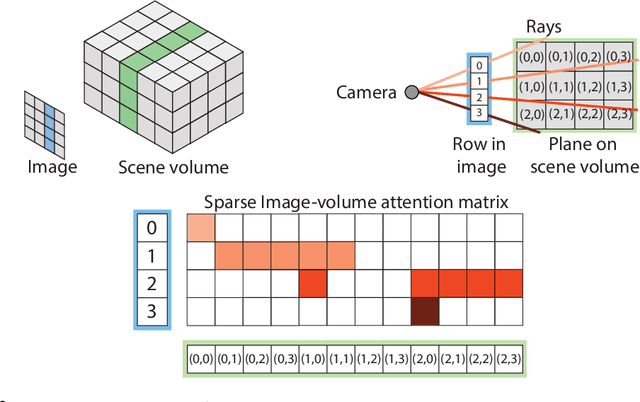
We propose a transformer-based neural network architecture for multi-object 3D reconstruction from RGB videos. It relies on two alternative ways to represent its knowledge: as a global 3D grid of features and an array of view-specific 2D grids. We progressively exchange information between the two with a dedicated bidirectional attention mechanism. We exploit knowledge about the image formation process to significantly sparsify the attention weight matrix, making our architecture feasible on current hardware, both in terms of memory and computation. We attach a DETR-style head on top of the 3D feature grid in order to detect the objects in the scene and to predict their 3D pose and 3D shape. Compared to previous methods, our architecture is single stage, end-to-end trainable, and it can reason holistically about a scene from multiple video frames without needing a brittle tracking step. We evaluate our method on the challenging Scan2CAD dataset, where we outperform (1) recent state-of-the-art methods for 3D object pose estimation from RGB videos; and (2) a strong alternative method combining Multi-view Stereo with RGB-D CAD alignment. We plan to release our source code.
DISK: Learning local features with policy gradient
Jun 24, 2020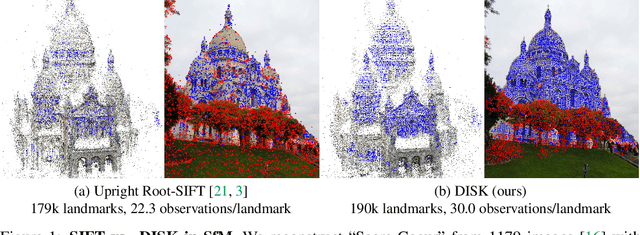
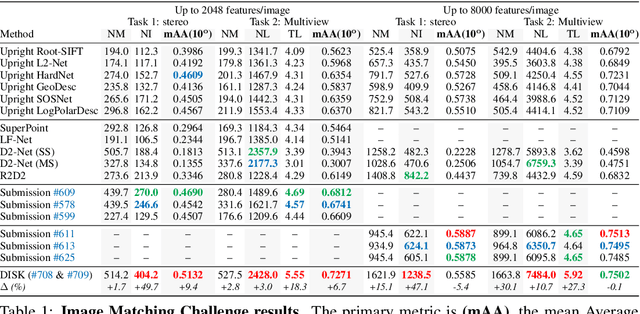
Local feature frameworks are difficult to learn in an end-to-end fashion, due to the discreteness inherent to the selection and matching of sparse keypoints. We introduce DISK (DIScrete Keypoints), a novel method that overcomes these obstacles by leveraging principles from Reinforcement Learning (RL), optimizing end-to-end for a high number of correct feature matches. Our simple yet expressive probabilistic model lets us keep the training and inference regimes close, while maintaining good enough convergence properties to reliably train from scratch. Our features can be extracted very densely while remaining discriminative, challenging commonly held assumptions about what constitutes a good keypoint, as showcased in Fig. 1, and deliver state-of-the-art results on three public benchmarks.