 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning on One Mode: Addressing Multi-Modality in Offline Reinforcement Learning
Dec 04, 2024Offline reinforcement learning (RL) seeks to learn optimal policies from static datasets without interacting with the environment. A common challenge is handling multi-modal action distributions, where multiple behaviours are represented in the data. Existing methods often assume unimodal behaviour policies, leading to suboptimal performance when this assumption is violated. We propose Weighted Imitation Learning on One Mode (LOM), a novel approach that focuses on learning from a single, promising mode of the behaviour policy. By using a Gaussian mixture model to identify modes and selecting the best mode based on expected returns, LOM avoids the pitfalls of averaging over conflicting actions. Theoretically, we show that LOM improves performance while maintaining simplicity in policy learning. Empirically, LOM outperforms existing methods on standard D4RL benchmarks and demonstrates its effectiveness in complex, multi-modal scenarios.
GOPlan: Goal-conditioned Offline Reinforcement Learning by Planning with Learned Models
Oct 30, 2023


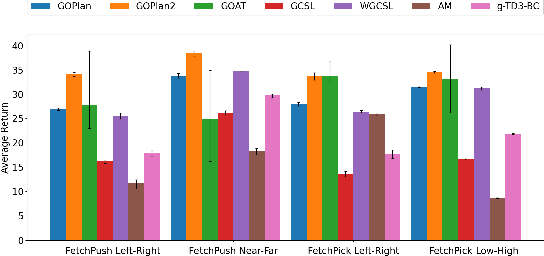
Offline goal-conditioned RL (GCRL) offers a feasible paradigm to learn general-purpose policies from diverse and multi-task offline datasets. Despite notable recent progress, the predominant offline GCRL methods have been restricted to model-free approaches, constraining their capacity to tackle limited data budgets and unseen goal generalization. In this work, we propose a novel two-stage model-based framework, Goal-conditioned Offline Planning (GOPlan), including (1) pretraining a prior policy capable of capturing multi-modal action distribution within the multi-goal dataset; (2) employing the reanalysis method with planning to generate imagined trajectories for funetuning policies. Specifically, the prior policy is based on an advantage-weighted Conditioned Generative Adversarial Networks that exhibits distinct mode separation to overcome the pitfalls of out-of-distribution (OOD) actions. For further policy optimization, the reanalysis method generates high-quality imaginary data by planning with learned models for both intra-trajectory and inter-trajectory goals. Through experimental evaluations, we demonstrate that GOPlan achieves state-of-the-art performance on various offline multi-goal manipulation tasks. Moreover, our results highlight the superior ability of GOPlan to handle small data budgets and generalize to OOD goals.
Goal-conditioned Offline Reinforcement Learning through State Space Partitioning
Mar 16, 2023Offline reinforcement learning (RL) aims to infer sequential decision policies using only offline datasets. This is a particularly difficult setup, especially when learning to achieve multiple different goals or outcomes under a given scenario with only sparse rewards. For offline learning of goal-conditioned policies via supervised learning, previous work has shown that an advantage weighted log-likelihood loss guarantees monotonic policy improvement. In this work we argue that, despite its benefits, this approach is still insufficient to fully address the distribution shift and multi-modality problems. The latter is particularly severe in long-horizon tasks where finding a unique and optimal policy that goes from a state to the desired goal is challenging as there may be multiple and potentially conflicting solutions. To tackle these challenges, we propose a complementary advantage-based weighting scheme that introduces an additional source of inductive bias: given a value-based partitioning of the state space, the contribution of actions expected to lead to target regions that are easier to reach, compared to the final goal, is further increased. Empirically, we demonstrate that the proposed approach, Dual-Advantage Weighted Offline Goal-conditioned RL (DAWOG), outperforms several competing offline algorithms in commonly used benchmarks. Analytically, we offer a guarantee that the learnt policy is never worse than the underlying behaviour policy.