 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurrent and Future Challenges in Humanoid Robotics -- An Empirical Investigation
Oct 14, 2023
The goal of RoboCup is to make research in the area of robotics measurable over time, and grow a community that works together to solve increasingly difficult challenges over the years. The most ambitious of these challenges it to be able to play against the human world champions in soccer in 2050. To better understand what members of the RoboCup community believes to be the state of the art and the main challenges in the next decade and towards the 2050 game, we developed a survey and distributed it to members of different experience level and background within the community. We present data from 39 responses. Results highlighted that locomotion, awareness and decision-making, and robustness of robots are among those considered of high importance for the community, while human-robot interaction and natural language processing and generation are rated of low in importance and difficulty.
Electric Sheep Team Description Paper Humanoid League Kid-Size 2019
Oct 20, 2019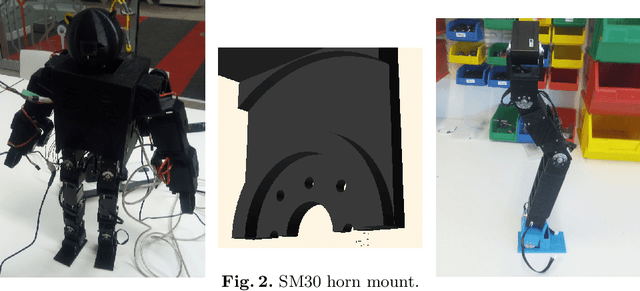


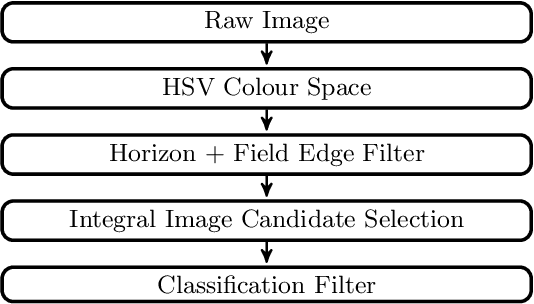
In this paper we introduce the newly formed New Zealand based RoboCup Humanoid Kid-Size team, Electric Sheep. We describe our developed humanoid robot platform, particularly our unique take on the chassis, electronics and use of several motor types to create a low-cost entry platform. To support this hardware, we discuss our software framework, vision processing, walking and game-play strategy methodology. Lastly we give an overview of future research interests within the team and intentions of future contributions for the league and the goal of RoboCup.
xYOLO: A Model For Real-Time Object Detection In Humanoid Soccer On Low-End Hardware
Oct 08, 2019



With the emergence of onboard vision processing for areas such as the internet of things (IoT), edge computing and autonomous robots, there is increasing demand for computationally efficient convolutional neural network (CNN) models to perform real-time object detection on resource constraints hardware devices. Tiny-YOLO is generally considered as one of the faster object detectors for low-end devices and is the basis for our work. Our experiments on this network have shown that Tiny-YOLO can achieve 0.14 frames per second(FPS) on the Raspberry Pi 3 B, which is too slow for soccer playing autonomous humanoid robots detecting goal and ball objects. In this paper we propose an adaptation to the YOLO CNN model named xYOLO, that can achieve object detection at a speed of 9.66 FPS on the Raspberry Pi 3 B. This is achieved by trading an acceptable amount of accuracy, making the network approximately 70 times faster than Tiny-YOLO. Greater inference speed-ups were also achieved on a desktop CPU and GPU. Additionally we contribute an annotated Darknet dataset for goal and ball detection.