 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Active-Inactive Obstacle Classification for Time-Optimal Collision Avoidance
Mar 20, 2024Time-optimal obstacle avoidance is a prevalent problem encountered in various fields, including robotics and autonomous vehicles, where the task involves determining a path for a moving vehicle to reach its goal while navigating around obstacles within its environment. This problem becomes increasingly challenging as the number of obstacles in the environment rises. We propose an iterative active-inactive obstacle approach, which involves identifying a subset of the obstacles as "active", that considers solely the effect of the "active" obstacles on the path of the moving vehicle. The remaining obstacles are considered "inactive" and are not considered in the path planning process. The obstacles are classified as 'active' on the basis of previous findings derived from prior iterations. This approach allows for a more efficient calculation of the optimal path by reducing the number of obstacles that need to be considered. The effectiveness of the proposed method is demonstrated with two different dynamic models using the various number of obstacles. The results show that the proposed method is able to find the optimal path in a timely manner, while also being able to handle a large number of obstacles in the environment and the constraints on the motion of the object.
Obstacle Identification and Ellipsoidal Decomposition for Fast Motion Planning in Unknown Dynamic Environments
Sep 28, 2022


Collision avoidance in the presence of dynamic obstacles in unknown environments is one of the most critical challenges for unmanned systems. In this paper, we present a method that identifies obstacles in terms of ellipsoids to estimate linear and angular obstacle velocities. Our proposed method is based on the idea of any object can be approximately expressed by ellipsoids. To achieve this, we propose a method based on variational Bayesian estimation of Gaussian mixture model, the Kyachiyan algorithm, and a refinement algorithm. Our proposed method does not require knowledge of the number of clusters and can operate in real-time, unlike existing optimization-based methods. In addition, we define an ellipsoid-based feature vector to match obstacles given two timely close point frames. Our method can be applied to any environment with static and dynamic obstacles, including the ones with rotating obstacles. We compare our algorithm with other clustering methods and show that when coupled with a trajectory planner, the overall system can efficiently traverse unknown environments in the presence of dynamic obstacles.
Learning How to Trade-Off Safety with Agility Using Deep Covariance Estimation for Perception Driven UAV Motion Planning
Dec 11, 2020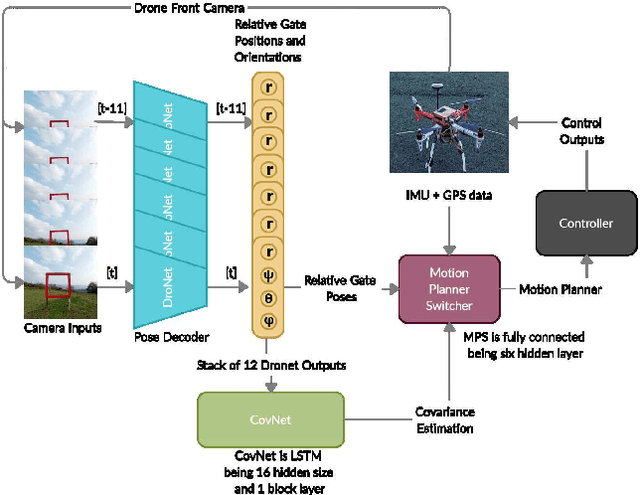
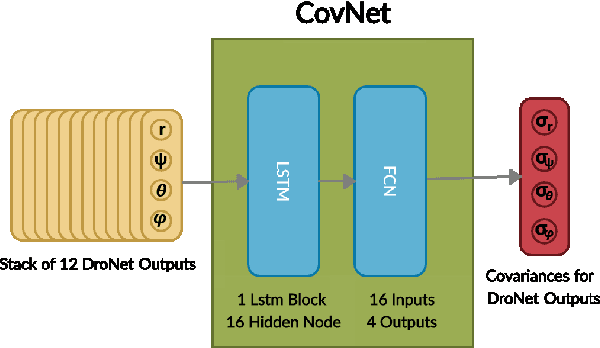
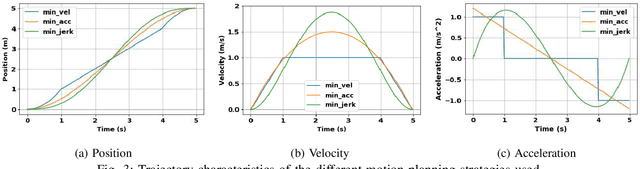
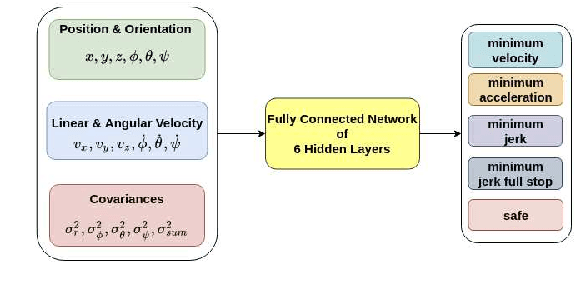
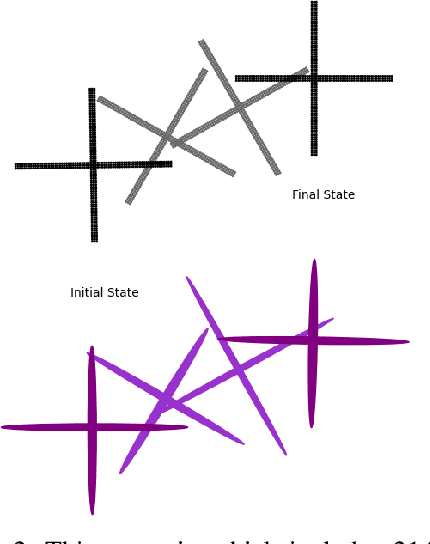
We investigate how to utilize predictive models for selecting appropriate motion planning strategies based on perception uncertainty estimation for agile unmanned aerial vehicle (UAV) navigation tasks. Although there are variety of motion planning and perception algorithms for such tasks, the impact of perception uncertainty is not explicitly handled in many of the current motion algorithms, which leads to performance loss in real-life scenarios where the measurement are often noisy due to external disturbances. We develop a novel framework for embedding perception uncertainty to high level motion planning management, in order to select the best available motion planning approach for the currently estimated perception uncertainty. We estimate the uncertainty in visual inputs using a deep neural network (CovNet) that explicitly predicts the covariance of the current measurements. Next, we train a high level machine learning model for predicting the lowest cost motion planning algorithm given the current estimate of covariance as well as the UAV states. We demonstrate on both real-life data and drone racing simulations that our approach, named uncertainty driven motion planning switcher (UDS) yields the safest and fastest trajectories among compared alternatives. Furthermore, we show that the developed approach learns how to trade-off safety with agility by switching to motion planners that leads to more agile trajectories when the estimated covariance is high and vice versa.