 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHARP-NeXt: High-Speed and Accurate Range-Point Fusion Network for 3D LiDAR Semantic Segmentation
Oct 08, 2025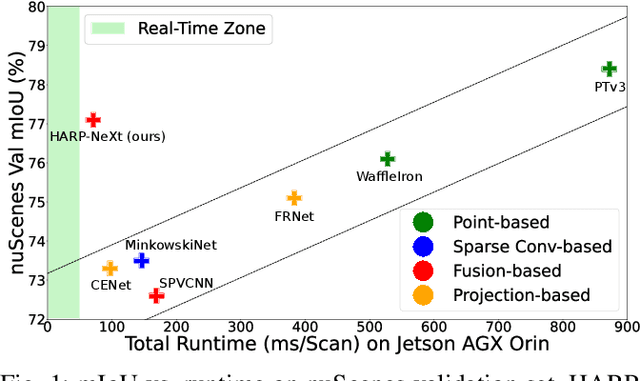
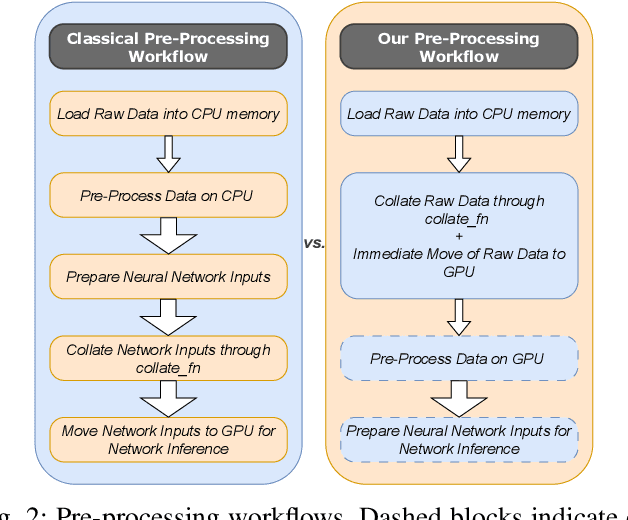
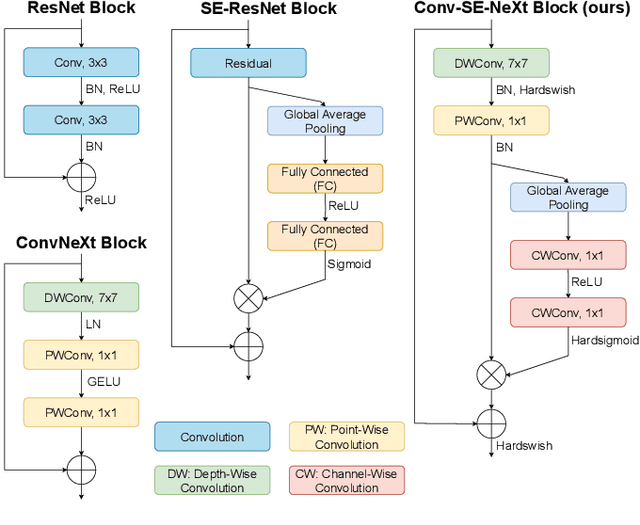
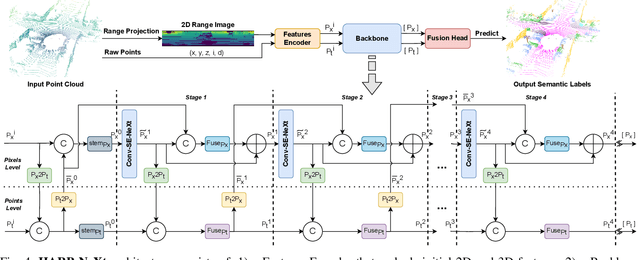
LiDAR semantic segmentation is crucial for autonomous vehicles and mobile robots, requiring high accuracy and real-time processing, especially on resource-constrained embedded systems. Previous state-of-the-art methods often face a trade-off between accuracy and speed. Point-based and sparse convolution-based methods are accurate but slow due to the complexity of neighbor searching and 3D convolutions. Projection-based methods are faster but lose critical geometric information during the 2D projection. Additionally, many recent methods rely on test-time augmentation (TTA) to improve performance, which further slows the inference. Moreover, the pre-processing phase across all methods increases execution time and is demanding on embedded platforms. Therefore, we introduce HARP-NeXt, a high-speed and accurate LiDAR semantic segmentation network. We first propose a novel pre-processing methodology that significantly reduces computational overhead. Then, we design the Conv-SE-NeXt feature extraction block to efficiently capture representations without deep layer stacking per network stage. We also employ a multi-scale range-point fusion backbone that leverages information at multiple abstraction levels to preserve essential geometric details, thereby enhancing accuracy. Experiments on the nuScenes and SemanticKITTI benchmarks show that HARP-NeXt achieves a superior speed-accuracy trade-off compared to all state-of-the-art methods, and, without relying on ensemble models or TTA, is comparable to the top-ranked PTv3, while running 24$\times$ faster. The code is available at https://github.com/SamirAbouHaidar/HARP-NeXt
Are We Ready for Real-Time LiDAR Semantic Segmentation in Autonomous Driving?
Oct 10, 2024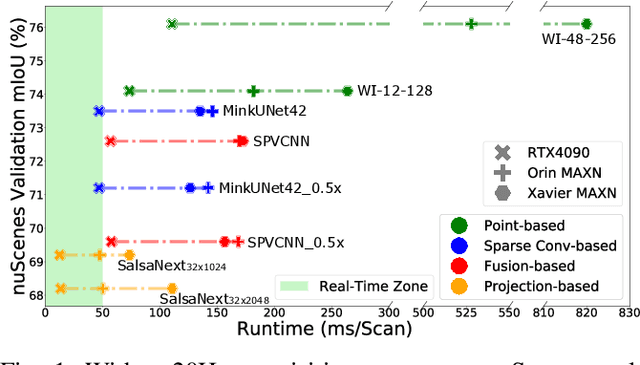
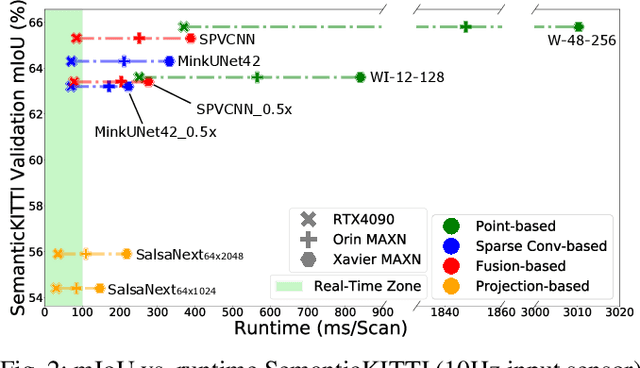
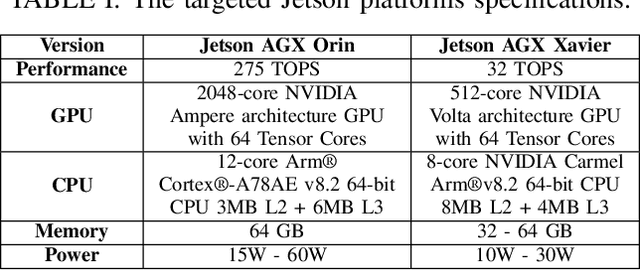
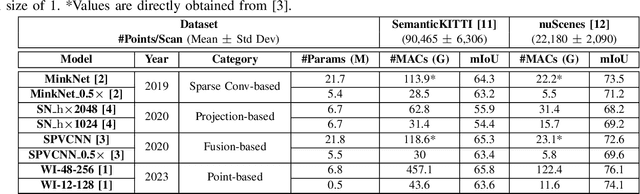
Within a perception framework for autonomous mobile and robotic systems, semantic analysis of 3D point clouds typically generated by LiDARs is key to numerous applications, such as object detection and recognition, and scene reconstruction. Scene semantic segmentation can be achieved by directly integrating 3D spatial data with specialized deep neural networks. Although this type of data provides rich geometric information regarding the surrounding environment, it also presents numerous challenges: its unstructured and sparse nature, its unpredictable size, and its demanding computational requirements. These characteristics hinder the real-time semantic analysis, particularly on resource-constrained hardware architectures that constitute the main computational components of numerous robotic applications. Therefore, in this paper, we investigate various 3D semantic segmentation methodologies and analyze their performance and capabilities for resource-constrained inference on embedded NVIDIA Jetson platforms. We evaluate them for a fair comparison through a standardized training protocol and data augmentations, providing benchmark results on the Jetson AGX Orin and AGX Xavier series for two large-scale outdoor datasets: SemanticKITTI and nuScenes.
A survey on real-time 3D scene reconstruction with SLAM methods in embedded systems
Sep 11, 2023
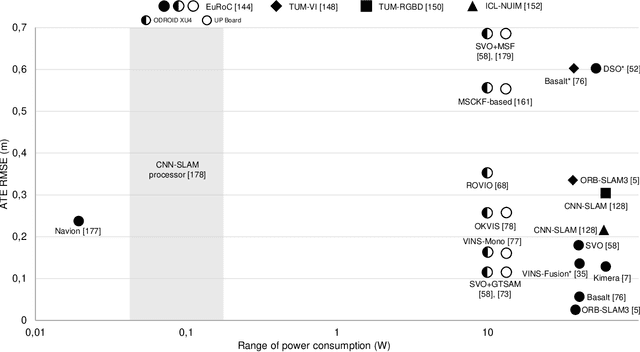

The 3D reconstruction of simultaneous localization and mapping (SLAM) is an important topic in the field for transport systems such as drones, service robots and mobile AR/VR devices. Compared to a point cloud representation, the 3D reconstruction based on meshes and voxels is particularly useful for high-level functions, like obstacle avoidance or interaction with the physical environment. This article reviews the implementation of a visual-based 3D scene reconstruction pipeline on resource-constrained hardware platforms. Real-time performances, memory management and low power consumption are critical for embedded systems. A conventional SLAM pipeline from sensors to 3D reconstruction is described, including the potential use of deep learning. The implementation of advanced functions with limited resources is detailed. Recent systems propose the embedded implementation of 3D reconstruction methods with different granularities. The trade-off between required accuracy and resource consumption for real-time localization and reconstruction is one of the open research questions identified and discussed in this paper.