 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoarse graining and reduced order models for plume ejection dynamics
Mar 06, 2025



Monitoring the atmospheric dispersion of pollutants is increasingly critical for environmental impact assessments. High-fidelity computational models are often employed to simulate plume dynamics, guiding decision-making and prioritizing resource deployment. However, such models can be prohibitively expensive to simulate, as they require resolving turbulent flows at fine spatial and temporal resolutions. Moreover, there are at least two distinct dynamical regimes of interest in the plume: (i) the initial ejection of the plume where turbulent mixing is generated by the shear-driven Kelvin-Helmholtz instability, and (ii) the ensuing turbulent diffusion and advection which is often modeled by the Gaussian plume model. We address the challenge of modeling the initial plume generation. Specifically, we propose a data-driven framework that identifies a reduced-order analytical model for plume dynamics -- directly from video data. We extract a time series of plume center and edge points from video snapshots and evaluate different regressions based to their extrapolation performance to generate a time series of coefficients that characterize the plume's overall direction and spread. We regress to a sinusoidal model inspired by the Kelvin-Helmholtz instability for the edge points in order to identify the plume's dispersion and vorticity. Overall, this reduced-order modeling framework provides a data-driven and lightweight approach to capture the dominant features of the initial nonlinear point-source plume dynamics, agnostic to plume type and starting only from video. The resulting model is a pre-cursor to standard models such as the Gaussian plume model and has the potential to enable rapid assessment and evaluation of critical environmental hazards, such as methane leaks, chemical spills, and pollutant dispersal from smokestacks.
Leveraging arbitrary mobile sensor trajectories with shallow recurrent decoder networks for full-state reconstruction
Jul 20, 2023Sensing is one of the most fundamental tasks for the monitoring, forecasting and control of complex, spatio-temporal systems. In many applications, a limited number of sensors are mobile and move with the dynamics, with examples including wearable technology, ocean monitoring buoys, and weather balloons. In these dynamic systems (without regions of statistical-independence), the measurement time history encodes a significant amount of information that can be extracted for critical tasks. Most model-free sensing paradigms aim to map current sparse sensor measurements to the high-dimensional state space, ignoring the time-history all together. Using modern deep learning architectures, we show that a sequence-to-vector model, such as an LSTM (long, short-term memory) network, with a decoder network, dynamic trajectory information can be mapped to full state-space estimates. Indeed, we demonstrate that by leveraging mobile sensor trajectories with shallow recurrent decoder networks, we can train the network (i) to accurately reconstruct the full state space using arbitrary dynamical trajectories of the sensors, (ii) the architecture reduces the variance of the mean-square error of the reconstruction error in comparison with immobile sensors, and (iii) the architecture also allows for rapid generalization (parameterization of dynamics) for data outside the training set. Moreover, the path of the sensor can be chosen arbitrarily, provided training data for the spatial trajectory of the sensor is available. The exceptional performance of the network architecture is demonstrated on three applications: turbulent flows, global sea-surface temperature data, and human movement biomechanics.
Discrepancy Modeling Framework: Learning missing physics, modeling systematic residuals, and disambiguating between deterministic and random effects
Mar 10, 2022

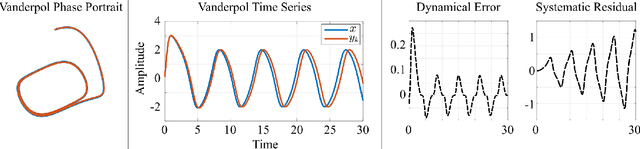
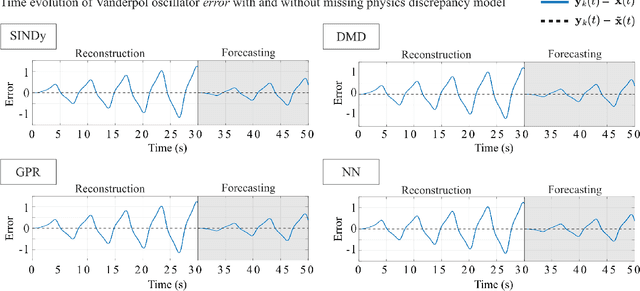
Physics-based and first-principles models pervade the engineering and physical sciences, allowing for the ability to model the dynamics of complex systems with a prescribed accuracy. The approximations used in deriving governing equations often result in discrepancies between the model and sensor-based measurements of the system, revealing the approximate nature of the equations and/or the signal-to-noise ratio of the sensor itself. In modern dynamical systems, such discrepancies between model and measurement can lead to poor quantification, often undermining the ability to produce accurate and precise control algorithms. We introduce a discrepancy modeling framework to resolve deterministic model-measurement mismatch with two distinct approaches: (i) by learning a model for the evolution of systematic state-space residual, and (ii) by discovering a model for the missing deterministic physics. Regardless of approach, a common suite of data-driven model discovery methods can be used. Specifically, we use four fundamentally different methods to demonstrate the mathematical implementations of discrepancy modeling: (i) the sparse identification of nonlinear dynamics (SINDy), (ii) dynamic mode decomposition (DMD), (iii) Gaussian process regression (GPR), and (iv) neural networks (NN). The choice of method depends on one's intent for discrepancy modeling, as well as quantity and quality of the sensor measurements. We demonstrate the utility and suitability for both discrepancy modeling approaches using the suite of data-driven modeling methods on three dynamical systems under varying signal-to-noise ratios. We compare reconstruction and forecasting accuracies and provide detailed comparatives, allowing one to select the appropriate approach and method in practice.