 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrepancy Modeling Framework: Learning missing physics, modeling systematic residuals, and disambiguating between deterministic and random effects
Paper and Code
Mar 10, 2022

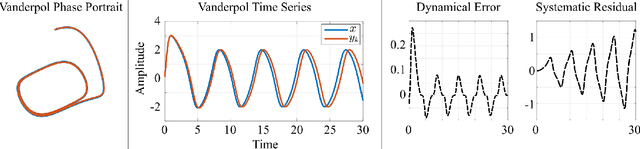
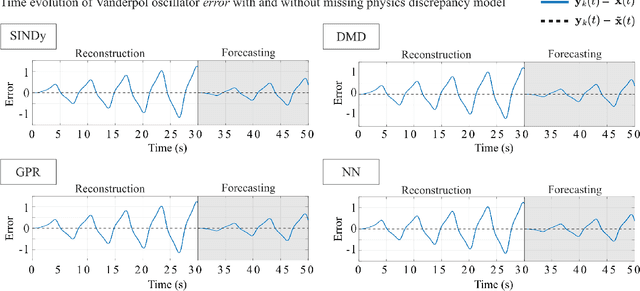
Physics-based and first-principles models pervade the engineering and physical sciences, allowing for the ability to model the dynamics of complex systems with a prescribed accuracy. The approximations used in deriving governing equations often result in discrepancies between the model and sensor-based measurements of the system, revealing the approximate nature of the equations and/or the signal-to-noise ratio of the sensor itself. In modern dynamical systems, such discrepancies between model and measurement can lead to poor quantification, often undermining the ability to produce accurate and precise control algorithms. We introduce a discrepancy modeling framework to resolve deterministic model-measurement mismatch with two distinct approaches: (i) by learning a model for the evolution of systematic state-space residual, and (ii) by discovering a model for the missing deterministic physics. Regardless of approach, a common suite of data-driven model discovery methods can be used. Specifically, we use four fundamentally different methods to demonstrate the mathematical implementations of discrepancy modeling: (i) the sparse identification of nonlinear dynamics (SINDy), (ii) dynamic mode decomposition (DMD), (iii) Gaussian process regression (GPR), and (iv) neural networks (NN). The choice of method depends on one's intent for discrepancy modeling, as well as quantity and quality of the sensor measurements. We demonstrate the utility and suitability for both discrepancy modeling approaches using the suite of data-driven modeling methods on three dynamical systems under varying signal-to-noise ratios. We compare reconstruction and forecasting accuracies and provide detailed comparatives, allowing one to select the appropriate approach and method in practice.