 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLangevin Diffusion Approximation to Same Marginal Schrödinger Bridge
May 12, 2025We introduce a novel approximation to the same marginal Schr\"{o}dinger bridge using the Langevin diffusion. As $\varepsilon \downarrow 0$, it is known that the barycentric projection (also known as the entropic Brenier map) of the Schr\"{o}dinger bridge converges to the Brenier map, which is the identity. Our diffusion approximation is leveraged to show that, under suitable assumptions, the difference between the two is $\varepsilon$ times the gradient of the marginal log density (i.e., the score function), in $\mathbf{L}^2$. More generally, we show that the family of Markov operators, indexed by $\varepsilon > 0$, derived from integrating test functions against the conditional density of the static Schr\"{o}dinger bridge at temperature $\varepsilon$, admits a derivative at $\varepsilon=0$ given by the generator of the Langevin semigroup. Hence, these operators satisfy an approximate semigroup property at low temperatures.
Iterated Schrödinger bridge approximation to Wasserstein Gradient Flows
Jun 16, 2024
We introduce a novel discretization scheme for Wasserstein gradient flows that involves successively computing Schr\"{o}dinger bridges with the same marginals. This is different from both the forward/geodesic approximation and the backward/Jordan-Kinderlehrer-Otto (JKO) approximations. The proposed scheme has two advantages: one, it avoids the use of the score function, and, two, it is amenable to particle-based approximations using the Sinkhorn algorithm. Our proof hinges upon showing that relative entropy between the Schr\"{o}dinger bridge with the same marginals at temperature $\epsilon$ and the joint distribution of a stationary Langevin diffusion at times zero and $\epsilon$ is of the order $o(\epsilon^2)$ with an explicit dependence given by Fisher information. Owing to this inequality, we can show, using a triangular approximation argument, that the interpolated iterated application of the Schr\"{o}dinger bridge approximation converge to the Wasserstein gradient flow, for a class of gradient flows, including the heat flow. The results also provide a probabilistic and rigorous framework for the convergence of the self-attention mechanisms in transformer networks to the solutions of heat flows, first observed in the inspiring work SABP22 in machine learning research.
Design and Development of Underwater Vehicle: ANAHITA
Mar 01, 2019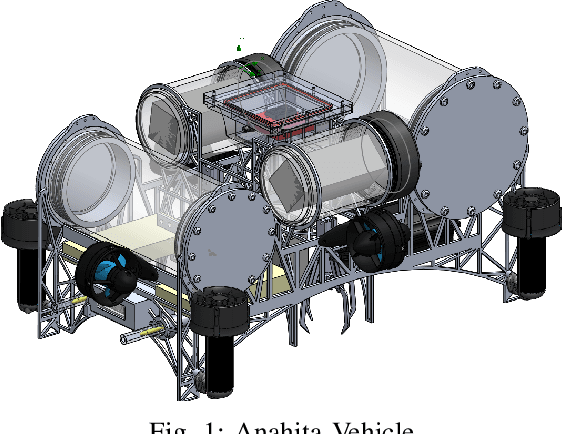
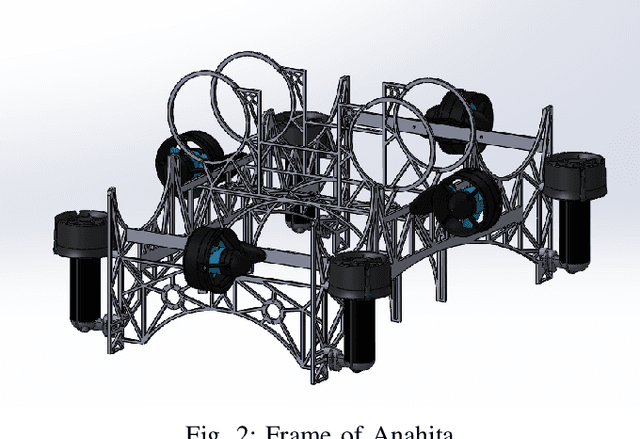

Anahita is an autonomous underwater vehicle which is currently being developed by interdisciplinary team of students at Indian Institute of Technology(IIT) Kanpur with aim to provide a platform for research in AUV to undergraduate students. This is the second vehicle which is being designed by AUV-IITK team to participate in 6th NIOT-SAVe competition organized by the National Institute of Ocean Technology, Chennai. The Vehicle has been completely redesigned with the major improvements in modularity and ease of access of all the components, keeping the design very compact and efficient. New advancements in the vehicle include, power distribution system and monitoring system. The sensors include the inertial measurement units (IMU), hydrophone array, a depth sensor, and two RGB cameras. The current vehicle features hot swappable battery pods giving a huge advantage over the previous vehicle, for longer runtime.