 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing UAV-UGV Coalition Operations: A Hybrid Clustering and Multi-Agent Reinforcement Learning Approach for Path Planning in Obstructed Environment
Jan 03, 2024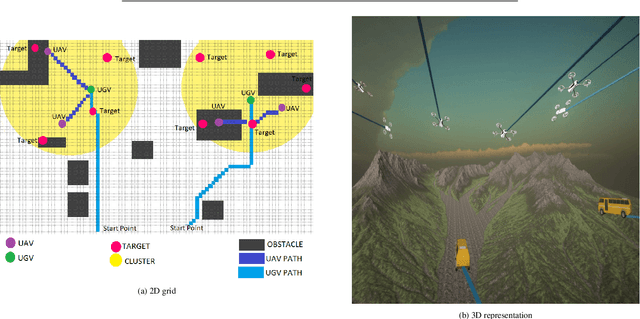
One of the most critical applications undertaken by coalitions of Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) is reaching predefined targets by following the most time-efficient routes while avoiding collisions. Unfortunately, UAVs are hampered by limited battery life, and UGVs face challenges in reachability due to obstacles and elevation variations. Existing literature primarily focuses on one-to-one coalitions, which constrains the efficiency of reaching targets. In this work, we introduce a novel approach for a UAV-UGV coalition with a variable number of vehicles, employing a modified mean-shift clustering algorithm to segment targets into multiple zones. Each vehicle utilizes Multi-agent Deep Deterministic Policy Gradient (MADDPG) and Multi-agent Proximal Policy Optimization (MAPPO), two advanced reinforcement learning algorithms, to form an effective coalition for navigating obstructed environments without collisions. This approach of assigning targets to various circular zones, based on density and range, significantly reduces the time required to reach these targets. Moreover, introducing variability in the number of UAVs and UGVs in a coalition enhances task efficiency by enabling simultaneous multi-target engagement. The results of our experimental evaluation demonstrate that our proposed method substantially surpasses current state-of-the-art techniques, nearly doubling efficiency in terms of target navigation time and task completion rate.
Human Behavior-based Personalized Meal Recommendation and Menu Planning Social System
Aug 12, 2023



The traditional dietary recommendation systems are basically nutrition or health-aware where the human feelings on food are ignored. Human affects vary when it comes to food cravings, and not all foods are appealing in all moods. A questionnaire-based and preference-aware meal recommendation system can be a solution. However, automated recognition of social affects on different foods and planning the menu considering nutritional demand and social-affect has some significant benefits of the questionnaire-based and preference-aware meal recommendations. A patient with severe illness, a person in a coma, or patients with locked-in syndrome and amyotrophic lateral sclerosis (ALS) cannot express their meal preferences. Therefore, the proposed framework includes a social-affective computing module to recognize the affects of different meals where the person's affect is detected using electroencephalography signals. EEG allows to capture the brain signals and analyze them to anticipate affective toward a food. In this study, we have used a 14-channel wireless Emotive Epoc+ to measure affectivity for different food items. A hierarchical ensemble method is applied to predict affectivity upon multiple feature extraction methods and TOPSIS (Technique for Order of Preference by Similarity to Ideal Solution) is used to generate a food list based on the predicted affectivity. In addition to the meal recommendation, an automated menu planning approach is also proposed considering a person's energy intake requirement, affectivity, and nutritional values of the different menus. The bin-packing algorithm is used for the personalized menu planning of breakfast, lunch, dinner, and snacks. The experimental findings reveal that the suggested affective computing, meal recommendation, and menu planning algorithms perform well across a variety of assessment parameters.