 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing UAV-UGV Coalition Operations: A Hybrid Clustering and Multi-Agent Reinforcement Learning Approach for Path Planning in Obstructed Environment
Paper and Code
Jan 03, 2024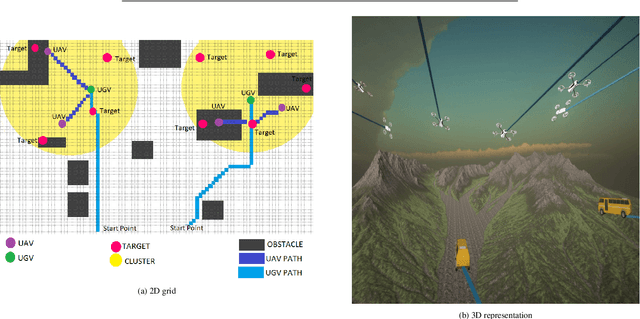
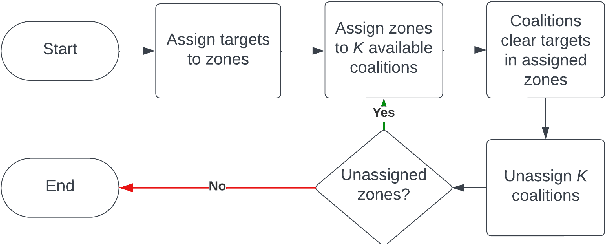
One of the most critical applications undertaken by coalitions of Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) is reaching predefined targets by following the most time-efficient routes while avoiding collisions. Unfortunately, UAVs are hampered by limited battery life, and UGVs face challenges in reachability due to obstacles and elevation variations. Existing literature primarily focuses on one-to-one coalitions, which constrains the efficiency of reaching targets. In this work, we introduce a novel approach for a UAV-UGV coalition with a variable number of vehicles, employing a modified mean-shift clustering algorithm to segment targets into multiple zones. Each vehicle utilizes Multi-agent Deep Deterministic Policy Gradient (MADDPG) and Multi-agent Proximal Policy Optimization (MAPPO), two advanced reinforcement learning algorithms, to form an effective coalition for navigating obstructed environments without collisions. This approach of assigning targets to various circular zones, based on density and range, significantly reduces the time required to reach these targets. Moreover, introducing variability in the number of UAVs and UGVs in a coalition enhances task efficiency by enabling simultaneous multi-target engagement. The results of our experimental evaluation demonstrate that our proposed method substantially surpasses current state-of-the-art techniques, nearly doubling efficiency in terms of target navigation time and task completion rate.