 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLabel Curation Using Agentic AI
Jan 30, 2026Data annotation is essential for supervised learning, yet producing accurate, unbiased, and scalable labels remains challenging as datasets grow in size and modality. Traditional human-centric pipelines are costly, slow, and prone to annotator variability, motivating reliability-aware automated annotation. We present AURA (Agentic AI for Unified Reliability Modeling and Annotation Aggregation), an agentic AI framework for large-scale, multi-modal data annotation. AURA coordinates multiple AI agents to generate and validate labels without requiring ground truth. At its core, AURA adapts a classical probabilistic model that jointly infers latent true labels and annotator reliability via confusion matrices, using Expectation-Maximization to reconcile conflicting annotations and aggregate noisy predictions. Across the four benchmark datasets evaluated, AURA achieves accuracy improvements of up to 5.8% over baseline. In more challenging settings with poor quality annotators, the improvement is up to 50% over baseline. AURA also accurately estimates the reliability of annotators, allowing assessment of annotator quality even without any pre-validation steps.
Fast k-connectivity Restoration in Multi-Robot Systems for Robust Communication Maintenance
Apr 04, 2024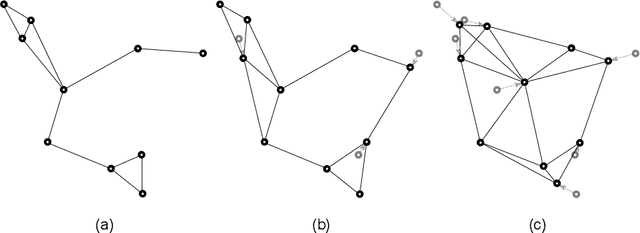
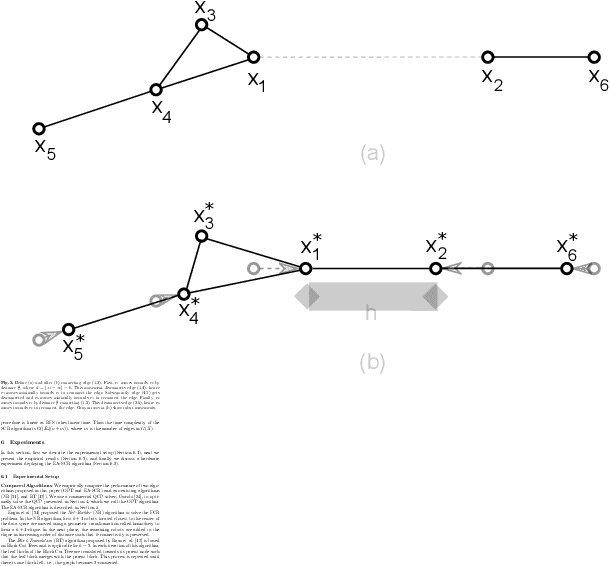
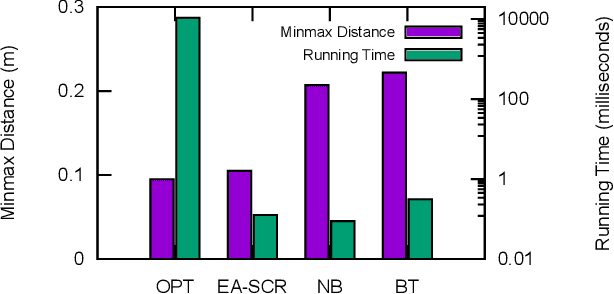
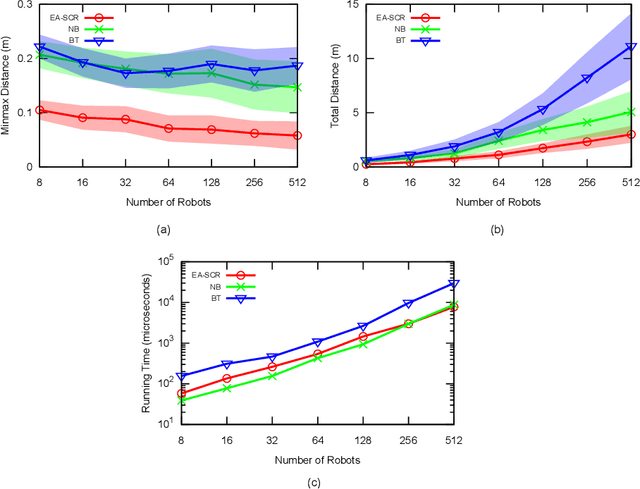
Maintaining a robust communication network plays an important role in the success of a multi-robot team jointly performing an optimization task. A key characteristic of a robust cooperative multi-robot system is the ability to repair the communication topology in the case of robot failure. In this paper, we focus on the Fast k-connectivity Restoration (FCR) problem, which aims to repair a network to make it k-connected with minimum robot movement. We develop a Quadratically Constrained Program (QCP) formulation of the FCR problem, which provides a way to optimally solve the problem, but cannot handle large instances due to high computational overhead. We therefore present a scalable algorithm, called EA-SCR, for the FCR problem using graph theoretic concepts. By conducting empirical studies, we demonstrate that the EA-SCR algorithm performs within 10 percent of the optimal while being orders of magnitude faster. We also show that EA-SCR outperforms existing solutions by 30 percent in terms of the FCR distance metric.
D2M2N: Decentralized Differentiable Memory-Enabled Mapping and Navigation for Multiple Robots
Oct 10, 2023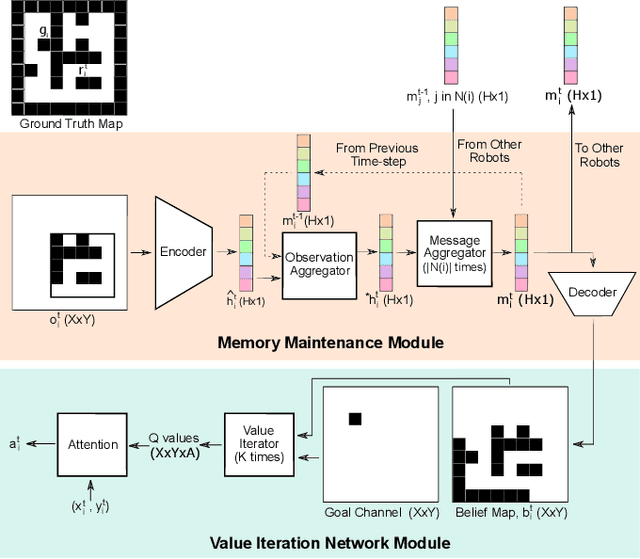
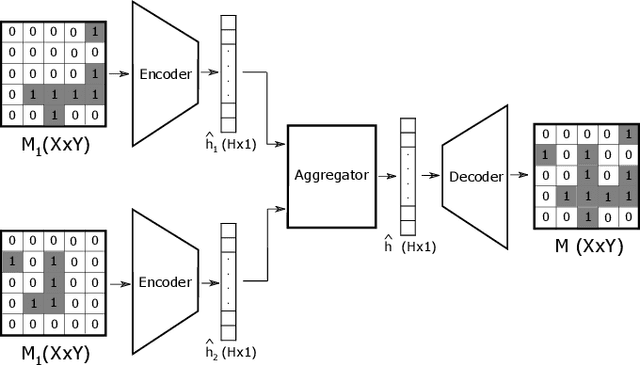
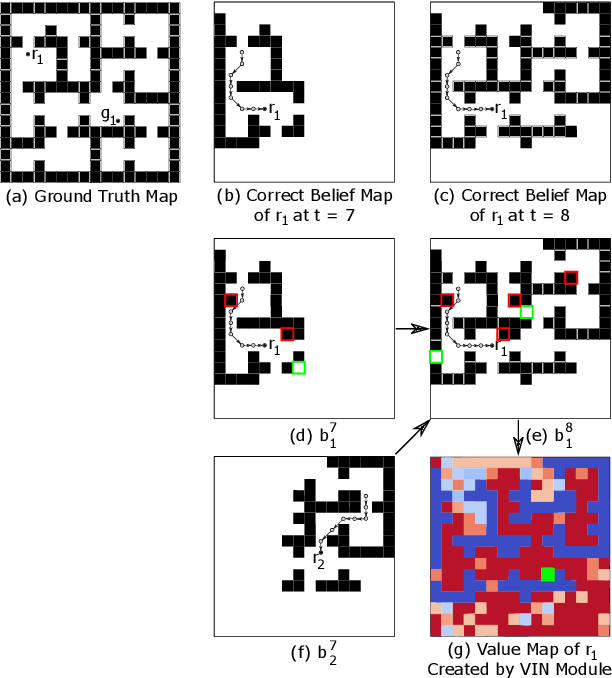
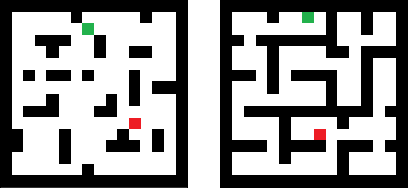
Recently, a number of learning-based models have been proposed for multi-robot navigation. However, these models lack memory and only rely on the current observations of the robot to plan their actions. They are unable to leverage past observations to plan better paths, especially in complex environments. In this work, we propose a fully differentiable and decentralized memory-enabled architecture for multi-robot navigation and mapping called D2M2N. D2M2N maintains a compact representation of the environment to remember past observations and uses Value Iteration Network for complex navigation. We conduct extensive experiments to show that D2M2N significantly outperforms the state-of-the-art model in complex mapping and navigation task.