 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Mechanics-Based Priors for Lateral Displacement Estimation in Ultrasound Elastography
May 31, 2023



Tracking the displacement between the pre- and post-deformed radio-frequency (RF) frames is a pivotal step of ultrasound elastography, which depicts tissue mechanical properties to identify pathologies. Due to ultrasound's poor ability to capture information pertaining to the lateral direction, the existing displacement estimation techniques fail to generate an accurate lateral displacement or strain map. The attempts made in the literature to mitigate this well-known issue suffer from one of the following limitations: 1) Sampling size is substantially increased, rendering the method computationally and memory expensive. 2) The lateral displacement estimation entirely depends on the axial one, ignoring data fidelity and creating large errors. This paper proposes exploiting the effective Poisson's ratio (EPR)-based mechanical correspondence between the axial and lateral strains along with the RF data fidelity and displacement continuity to improve the lateral displacement and strain estimation accuracies. We call our techniques MechSOUL (Mechanically-constrained Second-Order Ultrasound eLastography) and L1-MechSOUL (L1-norm-based MechSOUL), which optimize L2- and L1-norm-based penalty functions, respectively. Extensive validation experiments with simulated, phantom, and in vivo datasets demonstrate that MechSOUL and L1-MechSOUL's lateral strain and EPR estimation abilities are substantially superior to those of the recently-published elastography techniques. We have published the MATLAB codes of MechSOUL and L1-MechSOUL at http://code.sonography.ai.
Lateral Strain Imaging using Self-supervised and Physically Inspired Constraints in Unsupervised Regularized Elastography
Dec 16, 2022



Convolutional Neural Networks (CNN) have shown promising results for displacement estimation in UltraSound Elastography (USE). Many modifications have been proposed to improve the displacement estimation of CNNs for USE in the axial direction. However, the lateral strain, which is essential in several downstream tasks such as the inverse problem of elasticity imaging, remains a challenge. The lateral strain estimation is complicated since the motion and the sampling frequency in this direction are substantially lower than the axial one, and a lack of carrier signal in this direction. In computer vision applications, the axial and the lateral motions are independent. In contrast, the tissue motion pattern in USE is governed by laws of physics which link the axial and lateral displacements. In this paper, inspired by Hooke's law, we first propose Physically Inspired ConsTraint for Unsupervised Regularized Elastography (PICTURE), where we impose a constraint on the Effective Poisson's ratio (EPR) to improve the lateral strain estimation. In the next step, we propose self-supervised PICTURE (sPICTURE) to further enhance the strain image estimation. Extensive experiments on simulation, experimental phantom and in vivo data demonstrate that the proposed methods estimate accurate axial and lateral strain maps.
Analytic Optimization-Based Microbubble Tracking in Ultrasound Super-Resolution Microscopy
Sep 21, 2022
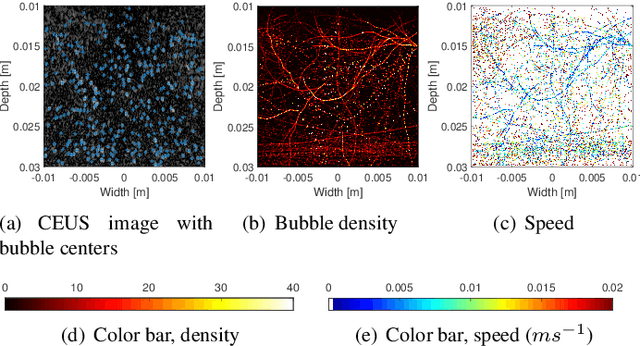
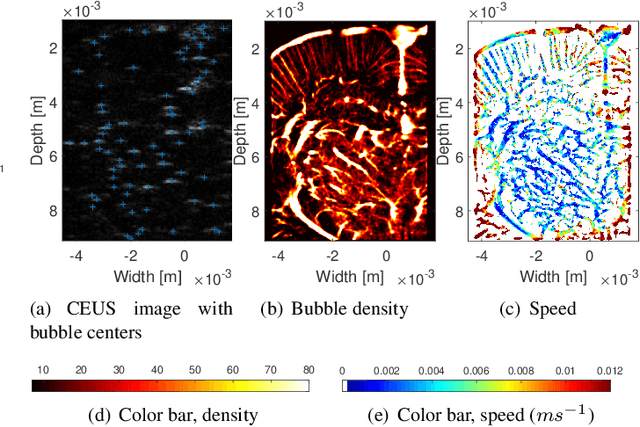
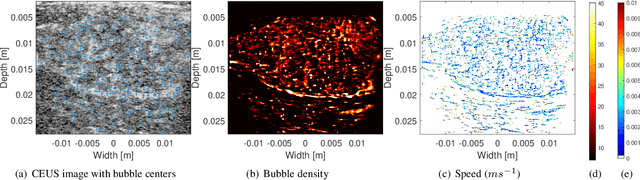
Ultrasound localization microscopy (ULM) refers to a promising medical imaging modality that systematically leverages the advantages of contrast-enhanced ultrasound (CEUS) to surpass the diffraction barrier and delineate the microvascular map. Localization and tracking of microbubbles (MBs), two significant steps of ULM, facilitate generating the vascular map and the velocity distribution, respectively. Herein, we propose a novel MB tracking technique considering temporal pairing as a bubble-set registration problem. Iterative registration is performed between the bubble sets in two consecutive time instants by analytically optimizing a cost function that takes position and point-spread function (PSF) similarities as well as physically plausible levels of bubbles' movement into account. Furthermore, we infer MBs' parity in a fuzzy manner instead of binary. The proposed technique performs well in validation experiments with two synthetic and two in vivo datasets provided by the Ultrasound Localisation and TRacking Algorithms for Super Resolution (ULTRA-SR) Challenge.
Incorporating Gradient Similarity for Robust Time Delay Estimation in Ultrasound Elastography
Mar 30, 2022
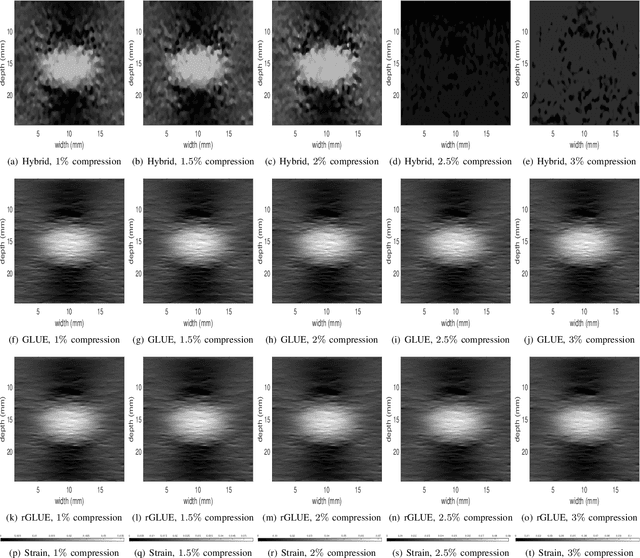

Energy-based ultrasound elastography techniques minimize a regularized cost function consisting of data and continuity terms to obtain local displacement estimates based on the local time-delay estimation (TDE) between radio-frequency (RF) frames. The data term associated with the existing techniques takes only the amplitude similarity into account and hence is not sufficiently robust to the outlier samples present in the RF frames under consideration. This drawback creates noticeable artifacts in the strain image. To resolve this issue, we propose to formulate the data function as a linear combination of the amplitude and gradient similarity constraints. We estimate the adaptive weight concerning each similarity term following an iterative scheme. Finally, we optimize the non-linear cost function in an efficient manner to convert the problem to a sparse system of linear equations which are solved for millions of variables. We call our technique rGLUE: robust data term in GLobal Ultrasound Elastography. rGLUE has been validated using simulation, phantom, in vivo liver, and breast datasets. In all of our experiments, rGLUE substantially outperforms the recent elastography methods both visually and quantitatively. For simulated, phantom, and in vivo datasets, respectively, rGLUE achieves 107%, 18%, and 23% improvements of signal-to-noise ratio (SNR) and 61%, 19%, and 25% improvements of contrast-to-noise ratio (CNR) over GLUE, a recently-published elastography algorithm.
ALTRUIST: Alternating Direction Method of Multipliers for Total Variation Regularization in Ultrasound Strain Imaging
Jan 12, 2022
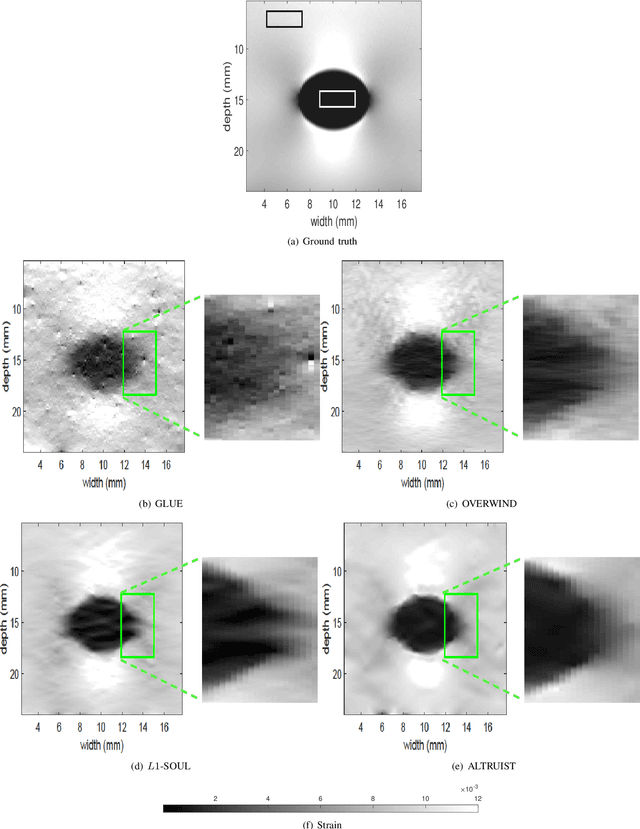
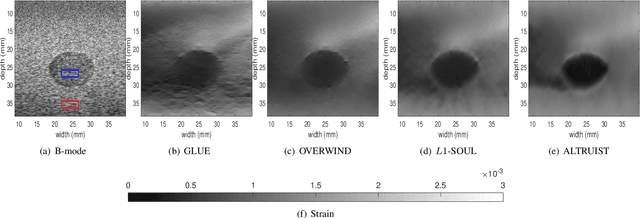
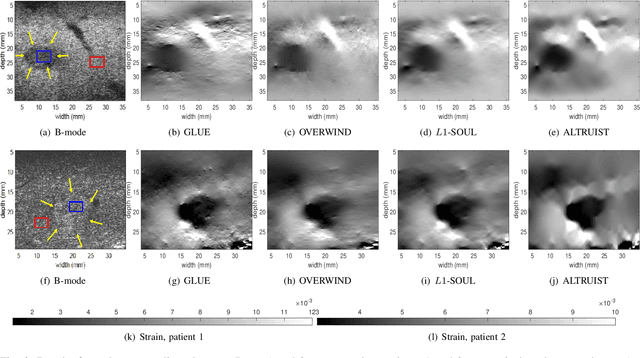
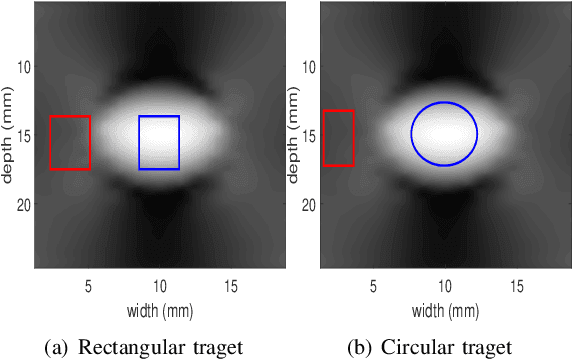
Ultrasound strain imaging, which delineates mechanical properties to detect tissue abnormalities, involves estimating the time-delay between two radio-frequency (RF) frames collected before and after tissue deformation. The existing regularized optimization-based time-delay estimation (TDE) techniques suffer from at least one of the following drawbacks: 1) The regularizer is not aligned with tissue deformation physics due to taking only the first-order displacement derivative into account. 2) The L2-norm of the displacement derivatives, which oversmoothes the estimated time-delay, is utilized as the regularizer. 3) The absolute value function's sharp corner should be approximated by a smooth function to facilitate the optimization of L1-norm. Herein, to resolve these shortcomings, we propose employing the alternating direction method of multipliers (ADMM) for optimizing a novel cost function consisting of L2-norm data fidelity term, L1-norm first- and second-order spatial continuity terms. ADMM empowers the proposed algorithm to use different techniques for optimizing different parts of the cost function and obtain high-contrast strain images with smooth background and sharp boundaries. We name our technique ADMM for totaL variaTion RegUlarIzation in ultrasound STrain imaging (ALTRUIST). In extensive simulation, phantom, and in vivo experiments, ALTRUIST substantially outperforms GLUE, OVERWIND, and L1-SOUL, three recently-published TDE algorithms, both qualitatively and quantitatively. ALTRUIST yields 89%, 88%, and 26% improvements of contrast-to-noise ratio over L1-SOUL for simulated, phantom, and in vivo liver cancer datasets, respectively. We will publish the ALTRUIST code after the acceptance of this paper at http://code.sonography.ai.
Second-Order Ultrasound Elastography with L1-norm Spatial Regularization
Jan 06, 2022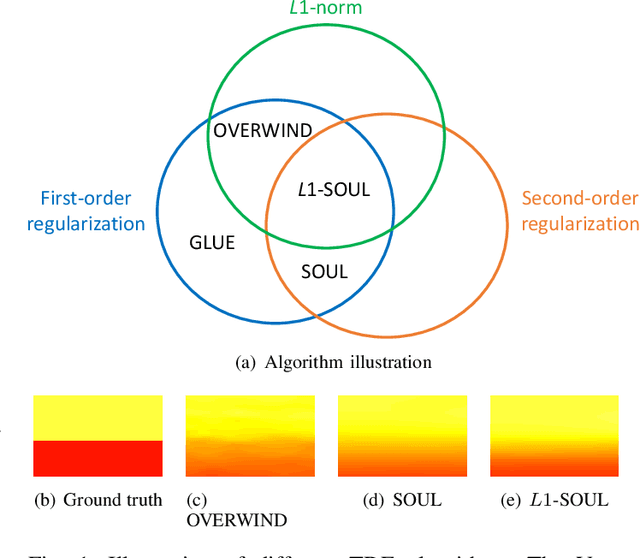
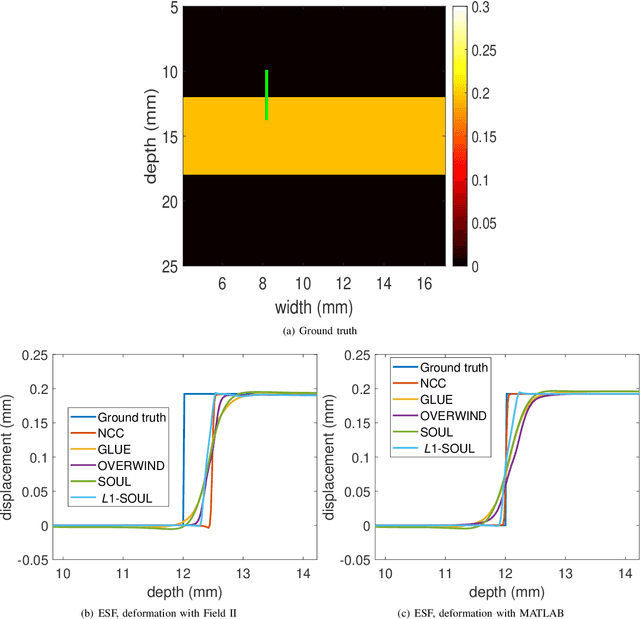
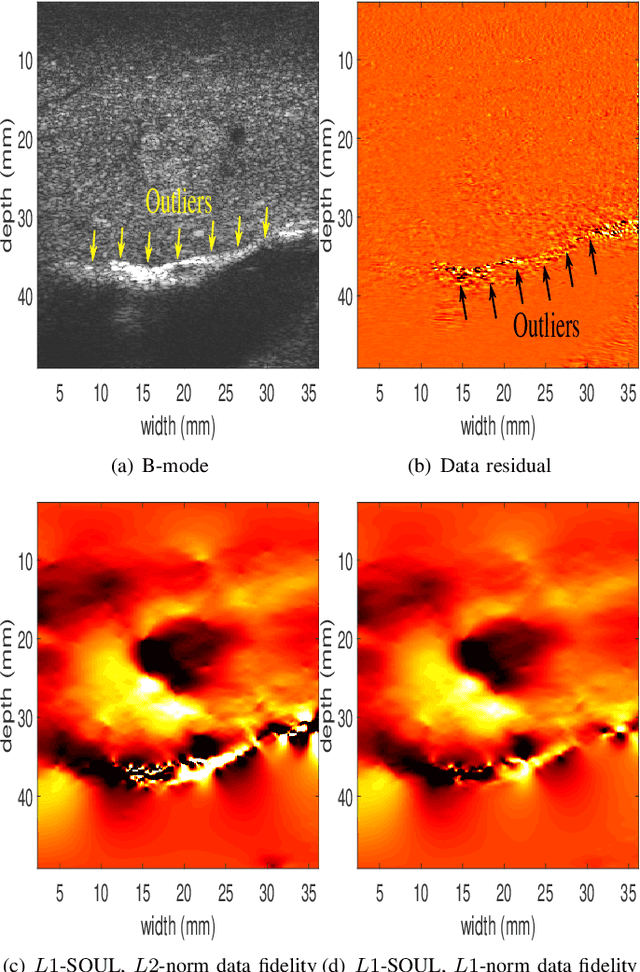
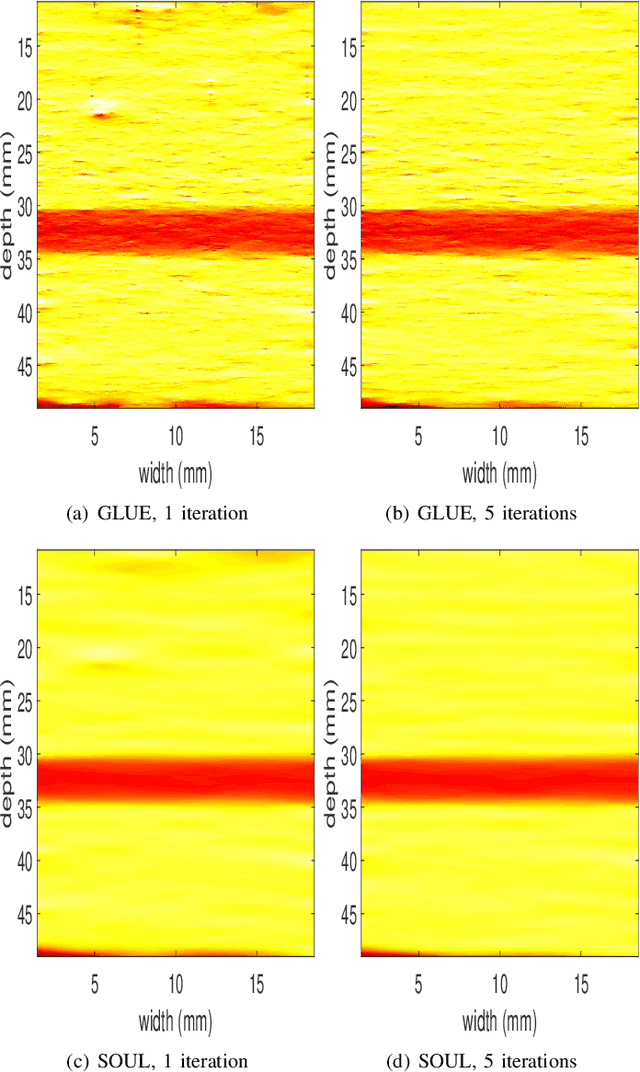
Time delay estimation (TDE) between two radio-frequency (RF) frames is one of the major steps of quasi-static ultrasound elastography, which detects tissue pathology by estimating its mechanical properties. Regularized optimization-based techniques, a prominent class of TDE algorithms, optimize a non-linear energy functional consisting of data constancy and spatial continuity constraints to obtain the displacement and strain maps between the time-series frames under consideration. The existing optimization-based TDE methods often consider the L2-norm of displacement derivatives to construct the regularizer. However, such a formulation over-penalizes the displacement irregularity and poses two major issues to the estimated strain field. First, the boundaries between different tissues are blurred. Second, the visual contrast between the target and the background is suboptimal. To resolve these issues, herein, we propose a novel TDE algorithm where instead of L2-, L1-norms of both first- and second-order displacement derivatives are taken into account to devise the continuity functional. We handle the non-differentiability of L1-norm by smoothing the absolute value function's sharp corner and optimize the resulting cost function in an iterative manner. We call our technique Second-Order Ultrasound eLastography with L1-norm spatial regularization (L1-SOUL). In terms of both sharpness and visual contrast, L1-SOUL substantially outperforms GLUE, OVERWIND, and SOUL, three recently published TDE algorithms in all validation experiments performed in this study. In cases of simulated, phantom, and in vivo datasets, respectively, L1-SOUL achieves 67.8%, 46.81%, and 117.35% improvements of contrast-to-noise ratio (CNR) over SOUL. The L1-SOUL code can be downloaded from http://code.sonography.ai.
Fast and Robust Localization of Surgical Array using Kalman Filter
Dec 22, 2020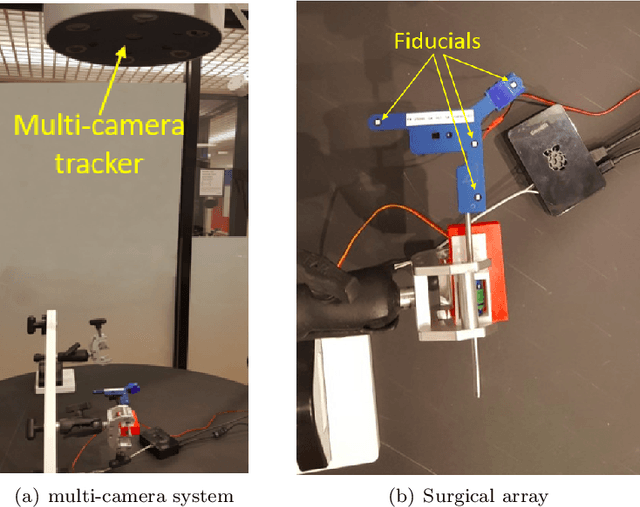
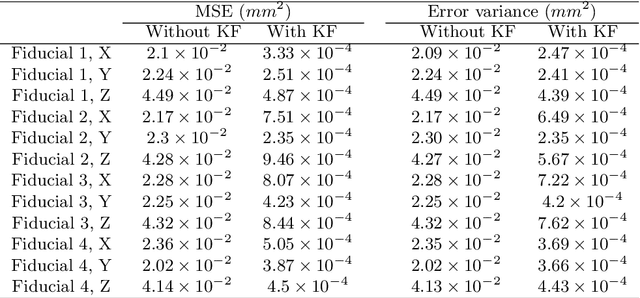
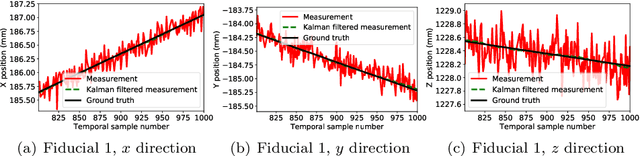
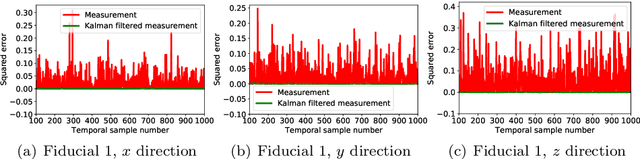
Intraoperative tracking of surgical instruments is an inevitable task of computer-assisted surgery. An optical tracking system often fails to precisely reconstruct the dynamic location and pose of a surgical tool due to the acquisition noise and measurement variance. Embedding a Kalman Filter (KF) or any of its extensions such as extended and unscented Kalman filters with the optical tracker resolves this issue by reducing the estimation variance and regularizing the temporal behavior. However, the current rigid-body KF implementations are computationally burdensome and hence, takes long execution time which hinders real-time surgical tracking. This paper introduces a fast and computationally efficient implementation of linear KF to improve the measurement accuracy of an optical tracking system with high temporal resolution. Instead of the surgical tool as a whole, our KF framework tracks each individual fiducial mounted on it using a Newtonian model. In addition to simulated dataset, we validate our technique against real data obtained from a high frame-rate commercial optical tracking system. The proposed KF framework substantially stabilizes the tracking behavior in all of our experiments and reduces the mean-squared error (MSE) from the order of $10^{-2}$ $mm^{2}$ to $10^{-4}$ $mm^{2}$.