 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Planning and Assignment for Ground Vehicles using Uncertain Perception from Aerial Vehicles
Mar 25, 2020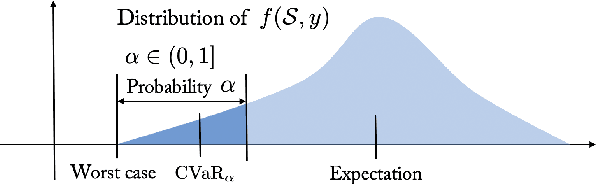



We propose a risk-aware framework for multi-robot, multi-demand assignment and planning in unknown environments. Our motivation is disaster response and search-and-rescue scenarios where ground vehicles must reach demand locations as soon as possible. We consider a setting where the terrain information is available only in the form of an aerial, georeferenced image. Deep learning techniques can be used for semantic segmentation of the aerial image to create a cost map for safe ground robot navigation. Such segmentation may still be noisy. Hence, we present a joint planning and perception framework that accounts for the risk introduced due to noisy perception. Our contributions are two-fold: (i) we show how to use Bayesian deep learning techniques to extract risk at the perception level; and (ii) use a risk-theoretical measure, CVaR, for risk-aware planning and assignment. The pipeline is theoretically established, then empirically analyzed through two datasets. We find that accounting for risk at both levels produces quantifiably safer paths and assignments.
Risk-Aware Planning by Confidence Estimation using Deep Learning-Based Perception
Sep 13, 2019
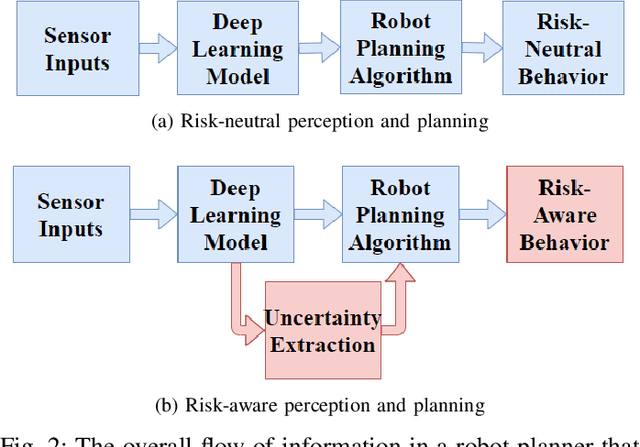

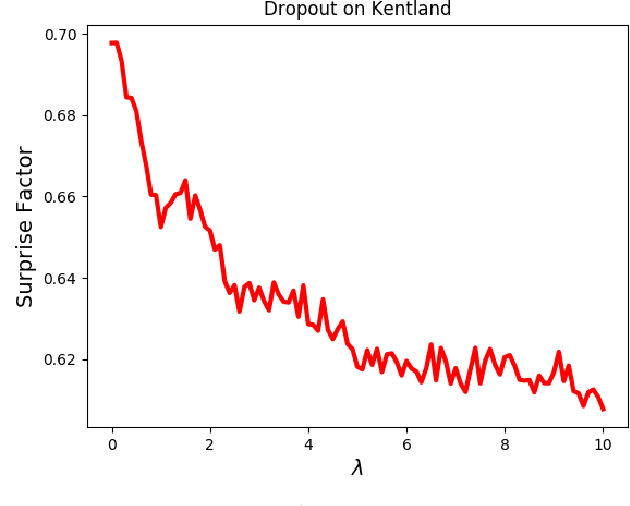
This work proposes the use of Bayesian approximations of uncertainty from deep learning in a robot planner, showing that this produces more cautious actions in safety-critical scenarios. The case study investigated is motivated by a setup where an aerial robot acts as a "scout" for a ground robot. This is useful when the below area is unknown or dangerous, with applications in space exploration, military, or search-and-rescue. Images taken from the aerial view are used to provide a less obstructed map to guide the navigation of the robot on the ground. Experiments are conducted using a deep learning semantic image segmentation, followed by a path planner based on the resulting cost map, to provide an empirical analysis of the proposed method. A comparison with similar approaches is presented to portray the usefulness of certain techniques, or variations within a technique, in similar experimental settings. The method is analyzed to assess the impact of variations in the uncertainty extraction, as well as the absence of an uncertainty metric, on the overall system with the use of a defined metric which measures surprise to the planner. The analysis is performed on multiple datasets, showing a similar trend of lower surprise when uncertainty information is incorporated in the planning, given threshold values of the hyperparameters in the uncertainty extraction have been met. We find that taking uncertainty into account leads to paths that could be 18% less risky on an average.