 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Geodesic Equations with Composite Bernstein Polynomials for Trajectory Planning
Feb 10, 2026This work presents a trajectory planning method based on composite Bernstein polynomials for autonomous systems navigating complex environments. The method is implemented in a symbolic optimization framework that enables continuous paths and precise control over trajectory shape. Trajectories are planned over a cost surface that encodes obstacles as continuous fields rather than discrete boundaries. Regions near obstacles are assigned higher costs, naturally encouraging the trajectory to maintain a safe distance while still allowing efficient routing through constrained spaces. The use of composite Bernstein polynomials preserves continuity while enabling fine control over local curvature to satisfy geodesic constraints. The symbolic representation supports exact derivatives, improving optimization efficiency. The method applies to both two- and three-dimensional environments and is suitable for ground, aerial, underwater, and space systems. In spacecraft trajectory planning, for example, it enables the generation of continuous, dynamically feasible trajectories with high numerical efficiency, making it well suited for orbital maneuvers, rendezvous and proximity operations, cluttered gravitational environments, and planetary exploration missions with limited onboard computational resources. Demonstrations show that the approach efficiently generates smooth, collision-free paths in scenarios with multiple obstacles, maintaining clearance without extensive sampling or post-processing. The optimization incorporates three constraint types: (1) a Gaussian surface inequality enforcing minimum obstacle clearance; (2) geodesic equations guiding the path along locally efficient directions on the cost surface; and (3) boundary constraints enforcing fixed start and end conditions. The method can serve as a standalone planner or as an initializer for more complex motion planning problems.
Path Planning for Continuum Rods Using Bernstein Surfaces
Dec 19, 2023This paper presents a method for optimal motion planning of continuum robots by employing Bernstein surfaces to approximate the system's dynamics and impose complex constraints, including collision avoidance. The main contribution is the approximation of infinite-dimensional continuous problems into their discrete counterparts, facilitating their solution using standard optimization solvers. This discretization leverages the unique properties of Bernstein surface, providing a framework that extends previous works which focused on ODEs approximated by Bernstein polynomials. Numerical validations are conducted through several numerical scenarios. The presented methodology offers a promising direction for solving complex optimal control problems in the realm of soft robotics.
Bioinspired Soft Robotics: state of the art, challenges, and future directions
Dec 19, 2023Purpose of Review: This review provides an overview of the state of the art in bioinspired soft robotics with by examining advancements in actuation, functionality, modeling, and control. Recent Findings: Recent research into actuation methods, such as artificial muscles, have expanded the functionality and potential use of bioinspired soft robots. Additionally, the application of finite dimensional models has improved computational efficiency for modeling soft continuum systems, and garnered interest as a basis for controller formulation. Summary: Bioinspiration in the field of soft robotics has led to diverse approaches to problems in a range of task spaces. In particular, new capabilities in system simplification, miniaturization, and untethering have each contributed to the field's growth. There is still significant room for improvement in the streamlining of design and manufacturing for these systems, as well as in their control.
Reduced Order Model of a Generic Submarine for Maneuvering Near the Surface
Dec 19, 2022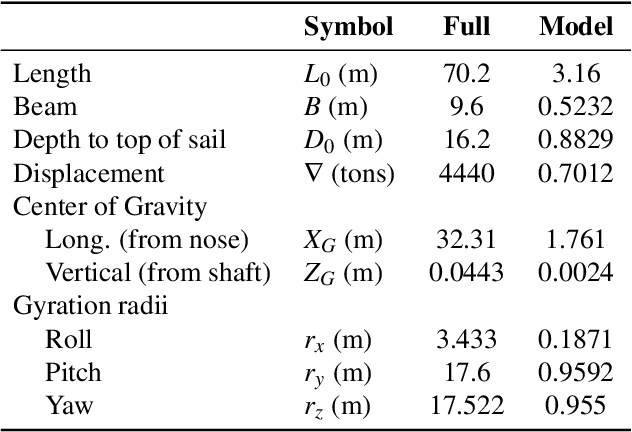
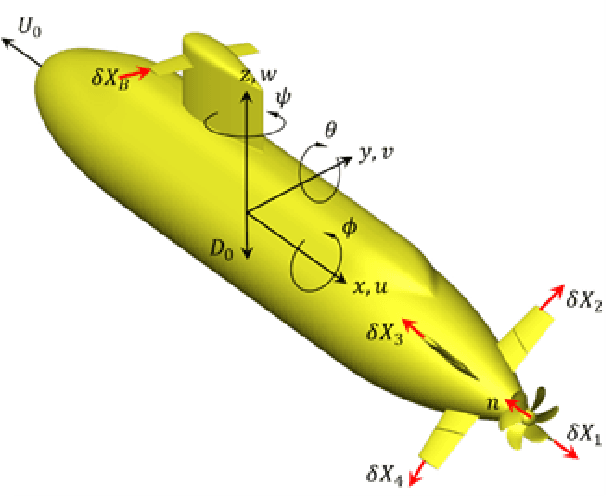
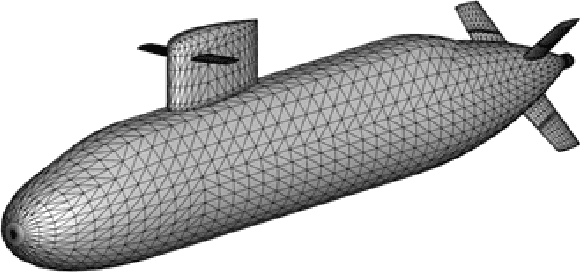
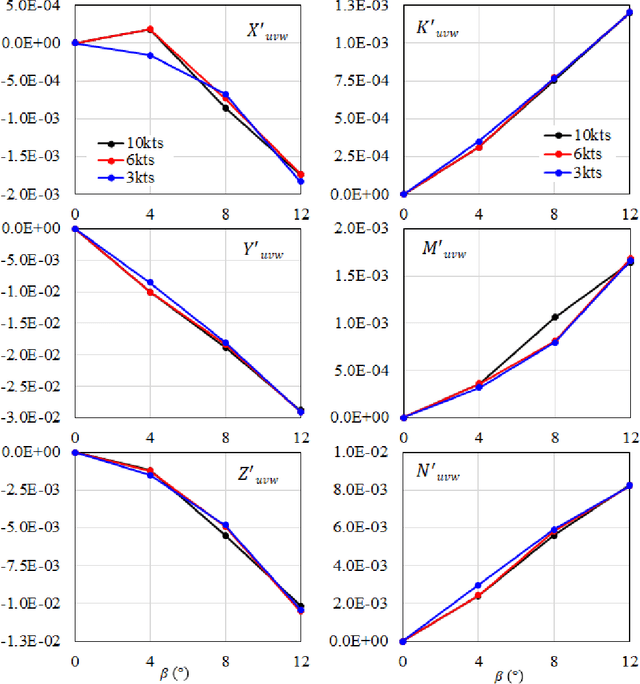
A reduced order model of a generic submarine is presented. Computational fluid dynamics (CFD) results are used to create and validate a model that includes depth dependence and the effect of waves on the craft. The model and the procedure to obtain its coefficients are discussed, and examples of the data used to obtain the model coefficients are presented. An example of operation following a complex path is presented and results from the reduced order model are compared to those from an equivalent CFD calculation. The controller implemented to complete these maneuvers is also presented.