 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGOMP-ST: Grasp Optimized Motion Planning for Suction Transport
Mar 16, 2022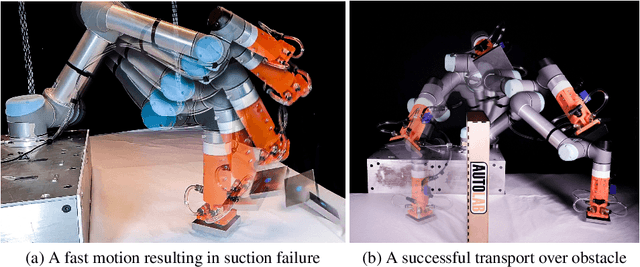
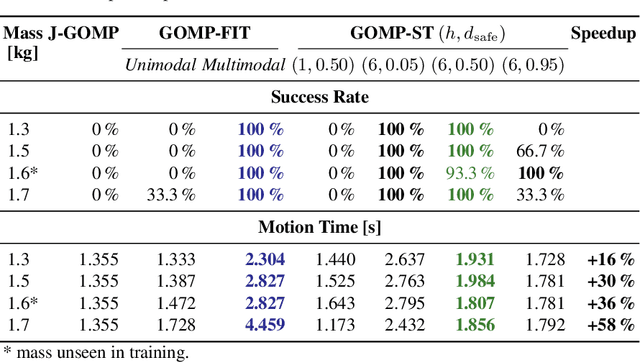
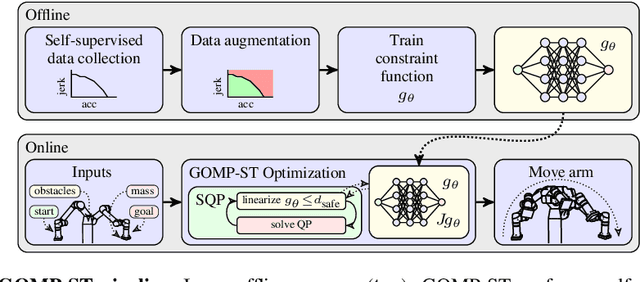
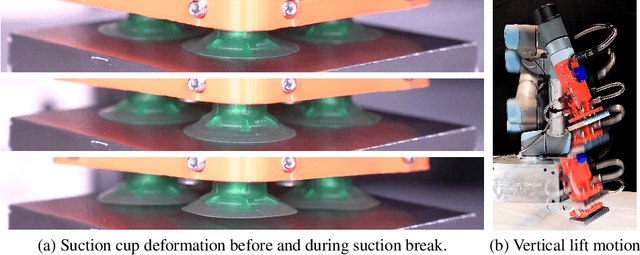
Suction cup grasping is very common in industry, but moving too quickly can cause suction cups to detach, causing drops or damage. Maintaining a suction grasp throughout a high-speed motion requires balancing suction forces against inertial forces while the suction cups deform under strain. In this paper, we consider Grasp Optimized Motion Planning for Suction Transport (GOMP-ST), an algorithm that combines deep learning with optimization to decrease transport time while avoiding suction cup failure. GOMP-ST first repeatedly moves a physical robot, vacuum gripper, and a sample object, while measuring pressure with a solid-state sensor to learn critical failure conditions. Then, these are integrated as constraints on the accelerations at the end-effector into a time-optimizing motion planner. The resulting plans incorporate real-world effects such as suction cup deformation that are difficult to model analytically. In GOMP-ST, the learned constraint, modeled with a neural network, is linearized using Autograd and integrated into a sequential quadratic program optimization. In 420 experiments with a physical UR5 transporting objects ranging from 1.3 to 1.7 kg, we compare GOMP-ST to baseline optimizing motion planners. Results suggest that GOMP-ST can avoid suction cup failure while decreasing transport times from 16% to 58%. For code, video, and datasets, see https://sites.google.com/view/gomp-st.