 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Crucial is Transformer in Decision Transformer?
Nov 26, 2022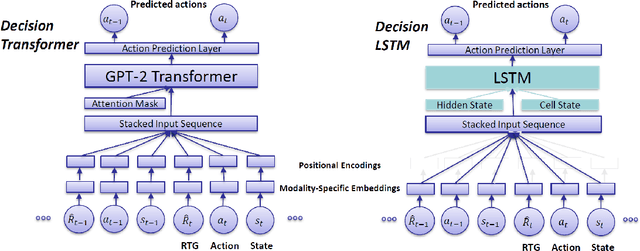
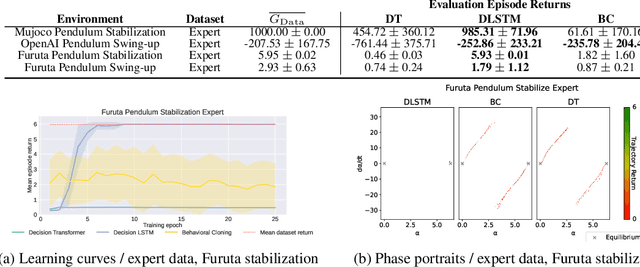
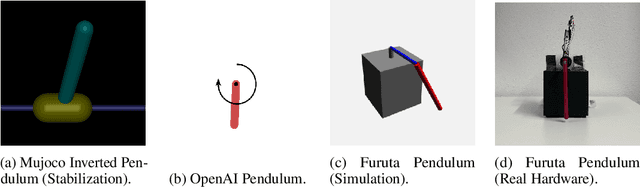
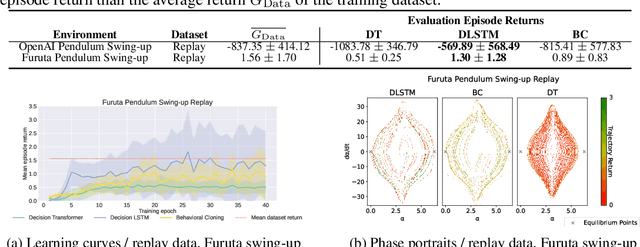
Decision Transformer (DT) is a recently proposed architecture for Reinforcement Learning that frames the decision-making process as an auto-regressive sequence modeling problem and uses a Transformer model to predict the next action in a sequence of states, actions, and rewards. In this paper, we analyze how crucial the Transformer model is in the complete DT architecture on continuous control tasks. Namely, we replace the Transformer by an LSTM model while keeping the other parts unchanged to obtain what we call a Decision LSTM model. We compare it to DT on continuous control tasks, including pendulum swing-up and stabilization, in simulation and on physical hardware. Our experiments show that DT struggles with continuous control problems, such as inverted pendulum and Furuta pendulum stabilization. On the other hand, the proposed Decision LSTM is able to achieve expert-level performance on these tasks, in addition to learning a swing-up controller on the real system. These results suggest that the strength of the Decision Transformer for continuous control tasks may lie in the overall sequential modeling architecture and not in the Transformer per se.