 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapture, Canonicalize, Splat: Zero-Shot 3D Gaussian Avatars from Unstructured Phone Images
Oct 15, 2025We present a novel, zero-shot pipeline for creating hyperrealistic, identity-preserving 3D avatars from a few unstructured phone images. Existing methods face several challenges: single-view approaches suffer from geometric inconsistencies and hallucinations, degrading identity preservation, while models trained on synthetic data fail to capture high-frequency details like skin wrinkles and fine hair, limiting realism. Our method introduces two key contributions: (1) a generative canonicalization module that processes multiple unstructured views into a standardized, consistent representation, and (2) a transformer-based model trained on a new, large-scale dataset of high-fidelity Gaussian splatting avatars derived from dome captures of real people. This "Capture, Canonicalize, Splat" pipeline produces static quarter-body avatars with compelling realism and robust identity preservation from unstructured photos.
3D-LaneNet+: Anchor Free Lane Detection using a Semi-Local Representation
Nov 04, 2020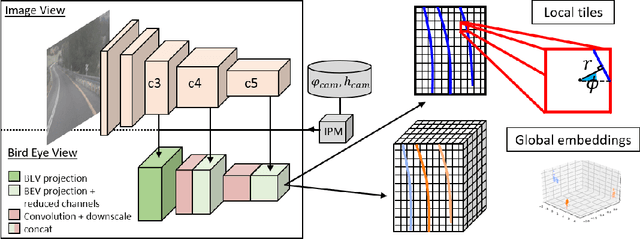

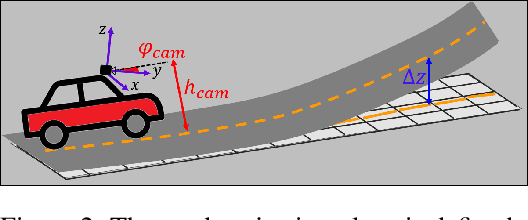
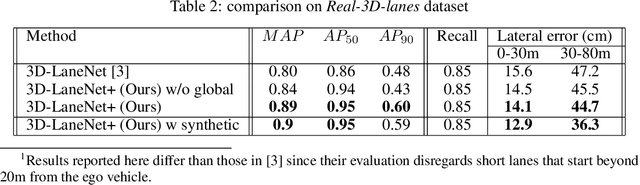
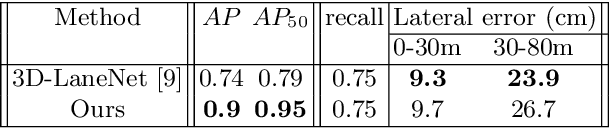
3D-LaneNet+ is a camera-based DNN method for anchor free 3D lane detection which is able to detect 3d lanes of any arbitrary topology such as splits, merges, as well as short and perpendicular lanes. We follow recently proposed 3D-LaneNet, and extend it to enable the detection of these previously unsupported lane topologies. Our output representation is an anchor free, semi-local tile representation that breaks down lanes into simple lane segments whose parameters can be learnt. In addition we learn, per lane instance, feature embedding that reasons for the global connectivity of locally detected segments to form full 3d lanes. This combination allows 3D-LaneNet+ to avoid using lane anchors, non-maximum suppression, and lane model fitting as in the original 3D-LaneNet. We demonstrate the efficacy of 3D-LaneNet+ using both synthetic and real world data. Results show significant improvement relative to the original 3D-LaneNet that can be attributed to better generalization to complex lane topologies, curvatures and surface geometries.
* arXiv admin note: substantial text overlap with arXiv:2003.05257
Semi-Local 3D Lane Detection and Uncertainty Estimation
Mar 11, 2020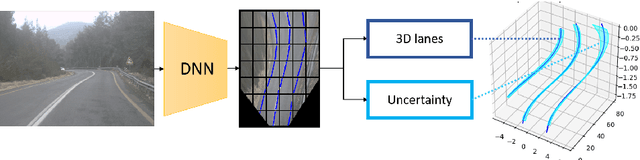

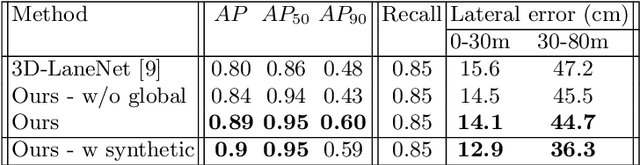
We propose a novel camera-based DNN method for 3D lane detection with uncertainty estimation. Our method is based on a semi-local, BEV, tile representation that breaks down lanes into simple lane segments. It combines learning a parametric model for the segments along with a deep feature embedding that is then used to cluster segment together into full lanes. This combination allows our method to generalize to complex lane topologies, curvatures and surface geometries. Additionally, our method is the first to output a learning based uncertainty estimation for the lane detection task. The efficacy of our method is demonstrated in extensive experiments achieving state-of-the-art results for camera-based 3D lane detection, while also showing our ability to generalize to complex topologies, curvatures and road geometries as well as to different cameras. We also demonstrate how our uncertainty estimation aligns with the empirical error statistics indicating that it is well calibrated and truly reflects the detection noise.