 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommissioning An All-Sky Infrared Camera Array for Detection Of Airborne Objects
Nov 12, 2024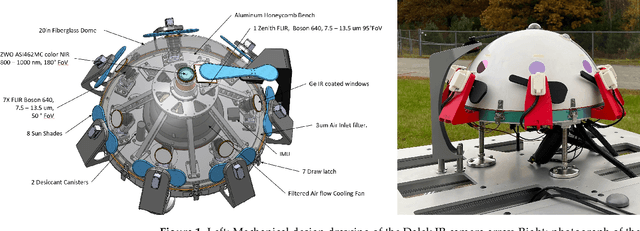
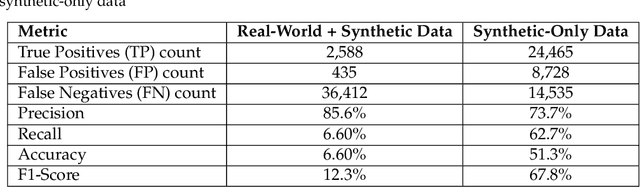
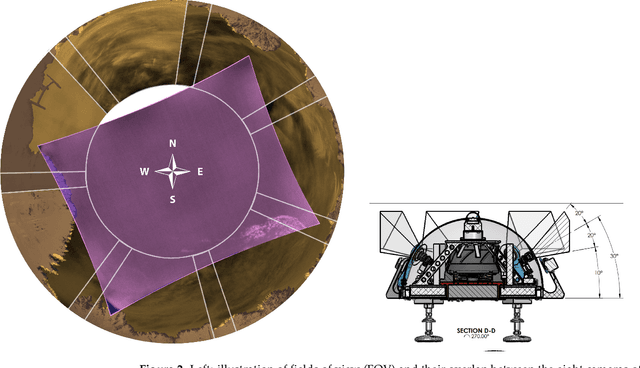
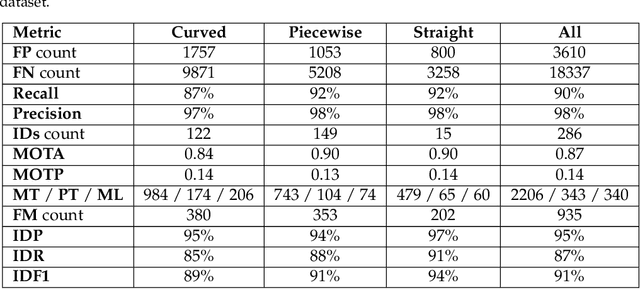
To date there is little publicly available scientific data on Unidentified Aerial Phenomena (UAP) whose properties and kinematics purportedly reside outside the performance envelope of known phenomena. To address this deficiency, the Galileo Project is designing, building, and commissioning a multi-modal ground-based observatory to continuously monitor the sky and conduct a rigorous long-term aerial census of all aerial phenomena, including natural and human-made. One of the key instruments is an all-sky infrared camera array using eight uncooled long-wave infrared FLIR Boson 640 cameras. Their calibration includes a novel extrinsic calibration method using airplane positions from Automatic Dependent Surveillance-Broadcast (ADS-B) data. We establish a first baseline for the system performance over five months of field operation, using a real-world dataset derived from ADS-B data, synthetic 3-D trajectories, and a hand-labelled real-world dataset. We report acceptance rates (e.g. viewable airplanes that are recorded) and detection efficiencies (e.g. recorded airplanes which are successfully detected) for a variety of weather conditions, range and aircraft size. We reconstruct $\sim$500,000 trajectories of aerial objects from this commissioning period. A toy outlier search focused on large sinuosity of the 2-D reconstructed trajectories flags about 16% of trajectories as outliers. After manual review, 144 trajectories remain ambiguous: they are likely mundane objects but cannot be elucidated at this stage of development without distance and kinematics estimation or other sensor modalities. Our observed count of ambiguous outliers combined with systematic uncertainties yields an upper limit of 18,271 outliers count for the five-month interval at a 95% confidence level. This likelihood-based method to evaluate significance is applicable to all of our future outlier searches.
The Scientific Investigation of Unidentified Aerial Phenomena (UAP) Using Multimodal Ground-Based Observatories
May 31, 2023(Abridged) Unidentified Aerial Phenomena (UAP) have resisted explanation and have received little formal scientific attention for 75 years. A primary objective of the Galileo Project is to build an integrated software and instrumentation system designed to conduct a multimodal census of aerial phenomena and to recognize anomalies. Here we present key motivations for the study of UAP and address historical objections to this research. We describe an approach for highlighting outlier events in the high-dimensional parameter space of our census measurements. We provide a detailed roadmap for deciding measurement requirements, as well as a science traceability matrix (STM) for connecting sought-after physical parameters to observables and instrument requirements. We also discuss potential strategies for deciding where to locate instruments for development, testing, and final deployment. Our instrument package is multimodal and multispectral, consisting of (1) wide-field cameras in multiple bands for targeting and tracking of aerial objects and deriving their positions and kinematics using triangulation; (2) narrow-field instruments including cameras for characterizing morphology, spectra, polarimetry, and photometry; (3) passive multistatic arrays of antennas and receivers for radar-derived range and kinematics; (4) radio spectrum analyzers to measure radio and microwave emissions; (5) microphones for sampling acoustic emissions in the infrasonic through ultrasonic frequency bands; and (6) environmental sensors for characterizing ambient conditions (temperature, pressure, humidity, and wind velocity), as well as quasistatic electric and magnetic fields, and energetic particles. The use of multispectral instruments and multiple sensor modalities will help to ensure that artifacts are recognized and that true detections are corroborated and verifiable.
* This paper is published in the Journal of Astronomical Instrumentation, 12(1), 2340006 (2023) https://doi.org/10.1142/S2251171723400068
A Hardware and Software Platform for Aerial Object Localization
May 29, 2023To date, there are little reliable data on the position, velocity and acceleration characteristics of Unidentified Aerial Phenomena (UAP). The dual hardware and software system described in this document provides a means to address this gap. We describe a weatherized multi-camera system which can capture images in the visible, infrared and near infrared wavelengths. We then describe the software we will use to calibrate the cameras and to robustly localize objects-of-interest in three dimensions. We show how object localizations captured over time will be used to compute the velocity and acceleration of airborne objects.