 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimpleMind adds thinking to deep neural networks
Dec 02, 2022



Deep neural networks (DNNs) detect patterns in data and have shown versatility and strong performance in many computer vision applications. However, DNNs alone are susceptible to obvious mistakes that violate simple, common sense concepts and are limited in their ability to use explicit knowledge to guide their search and decision making. While overall DNN performance metrics may be good, these obvious errors, coupled with a lack of explainability, have prevented widespread adoption for crucial tasks such as medical image analysis. The purpose of this paper is to introduce SimpleMind, an open-source software framework for Cognitive AI focused on medical image understanding. It allows creation of a knowledge base that describes expected characteristics and relationships between image objects in an intuitive human-readable form. The SimpleMind framework brings thinking to DNNs by: (1) providing methods for reasoning with the knowledge base about image content, such as spatial inferencing and conditional reasoning to check DNN outputs; (2) applying process knowledge, in the form of general-purpose software agents, that are chained together to accomplish image preprocessing, DNN prediction, and result post-processing, and (3) performing automatic co-optimization of all knowledge base parameters to adapt agents to specific problems. SimpleMind enables reasoning on multiple detected objects to ensure consistency, providing cross checking between DNN outputs. This machine reasoning improves the reliability and trustworthiness of DNNs through an interpretable model and explainable decisions. Example applications are provided that demonstrate how SimpleMind supports and improves deep neural networks by embedding them within a Cognitive AI framework.
ADAPT: An Open-Source sUAS Payload for Real-Time Disaster Prediction and Response with AI
Jan 25, 2022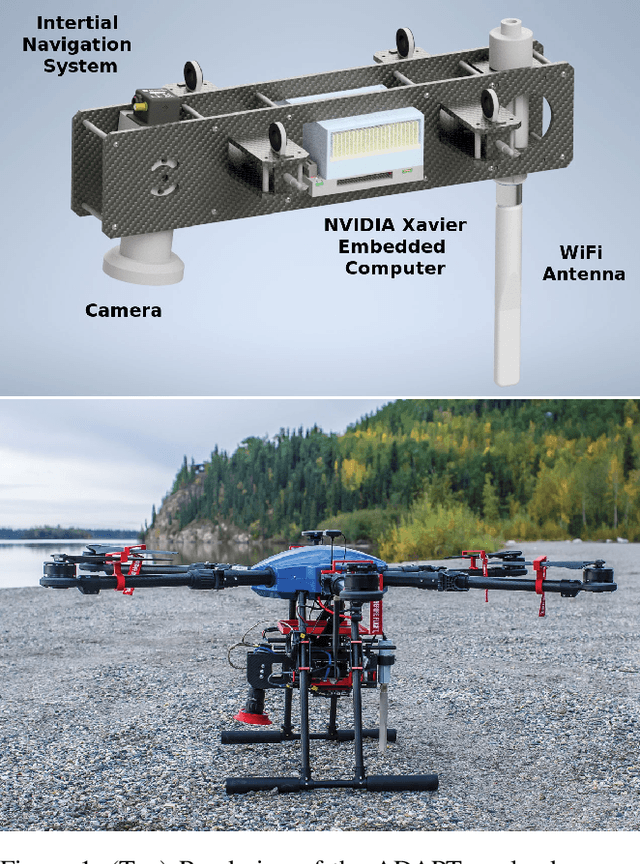
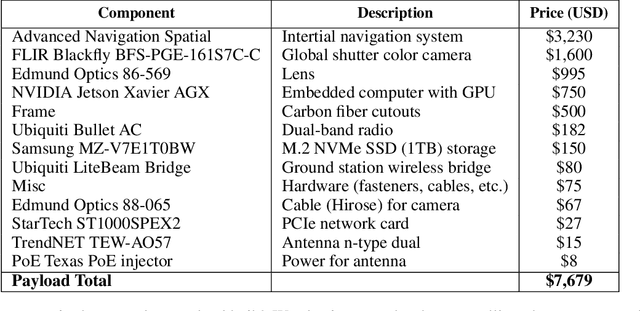
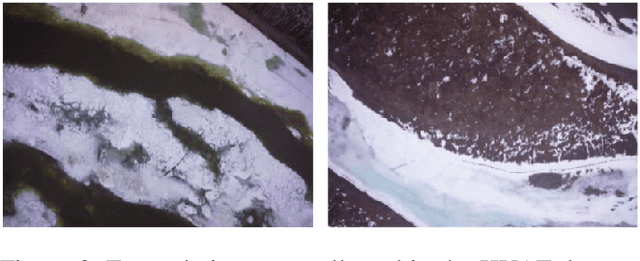
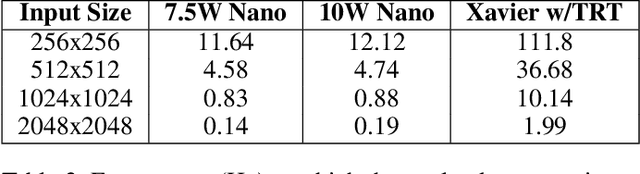
Small unmanned aircraft systems (sUAS) are becoming prominent components of many humanitarian assistance and disaster response (HADR) operations. Pairing sUAS with onboard artificial intelligence (AI) substantially extends their utility in covering larger areas with fewer support personnel. A variety of missions, such as search and rescue, assessing structural damage, and monitoring forest fires, floods, and chemical spills, can be supported simply by deploying the appropriate AI models. However, adoption by resource-constrained groups, such as local municipalities, regulatory agencies, and researchers, has been hampered by the lack of a cost-effective, readily-accessible baseline platform that can be adapted to their unique missions. To fill this gap, we have developed the free and open-source ADAPT multi-mission payload for deploying real-time AI and computer vision onboard a sUAS during local and beyond-line-of-site missions. We have emphasized a modular design with low-cost, readily-available components, open-source software, and thorough documentation (https://kitware.github.io/adapt/). The system integrates an inertial navigation system, high-resolution color camera, computer, and wireless downlink to process imagery and broadcast georegistered analytics back to a ground station. Our goal is to make it easy for the HADR community to build their own copies of the ADAPT payload and leverage the thousands of hours of engineering we have devoted to developing and testing. In this paper, we detail the development and testing of the ADAPT payload. We demonstrate the example mission of real-time, in-flight ice segmentation to monitor river ice state and provide timely predictions of catastrophic flooding events. We deploy a novel active learning workflow to annotate river ice imagery, train a real-time deep neural network for ice segmentation, and demonstrate operation in the field.