 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeADAPT: An Open-Source sUAS Payload for Real-Time Disaster Prediction and Response with AI
Jan 25, 2022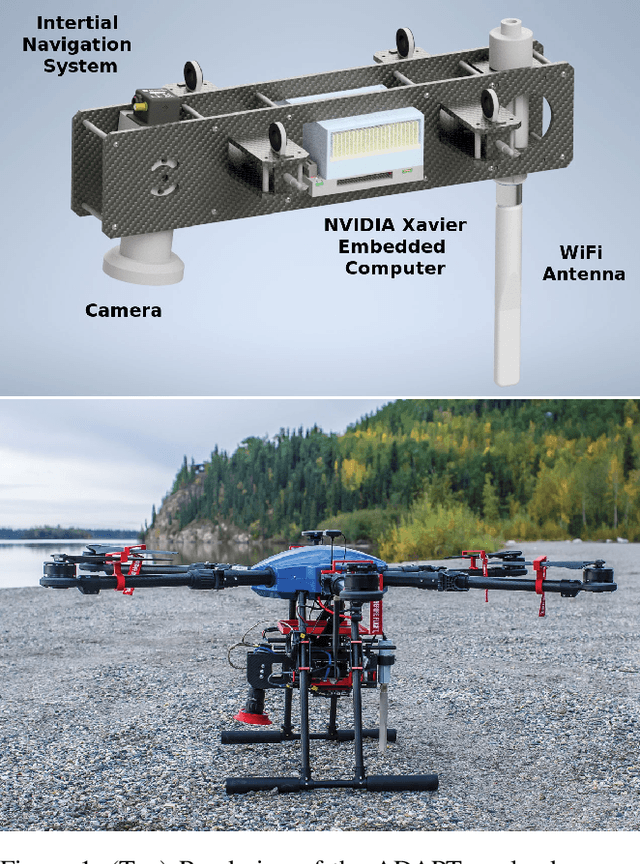
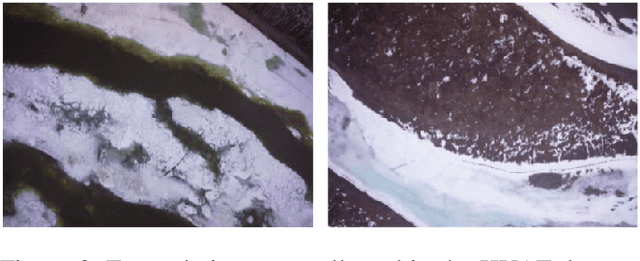
Small unmanned aircraft systems (sUAS) are becoming prominent components of many humanitarian assistance and disaster response (HADR) operations. Pairing sUAS with onboard artificial intelligence (AI) substantially extends their utility in covering larger areas with fewer support personnel. A variety of missions, such as search and rescue, assessing structural damage, and monitoring forest fires, floods, and chemical spills, can be supported simply by deploying the appropriate AI models. However, adoption by resource-constrained groups, such as local municipalities, regulatory agencies, and researchers, has been hampered by the lack of a cost-effective, readily-accessible baseline platform that can be adapted to their unique missions. To fill this gap, we have developed the free and open-source ADAPT multi-mission payload for deploying real-time AI and computer vision onboard a sUAS during local and beyond-line-of-site missions. We have emphasized a modular design with low-cost, readily-available components, open-source software, and thorough documentation (https://kitware.github.io/adapt/). The system integrates an inertial navigation system, high-resolution color camera, computer, and wireless downlink to process imagery and broadcast georegistered analytics back to a ground station. Our goal is to make it easy for the HADR community to build their own copies of the ADAPT payload and leverage the thousands of hours of engineering we have devoted to developing and testing. In this paper, we detail the development and testing of the ADAPT payload. We demonstrate the example mission of real-time, in-flight ice segmentation to monitor river ice state and provide timely predictions of catastrophic flooding events. We deploy a novel active learning workflow to annotate river ice imagery, train a real-time deep neural network for ice segmentation, and demonstrate operation in the field.