 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a Photon-Counting Deadtime Noise Model that Extends Dynamic Range and Resolution in Atmospheric Lidar
Jun 10, 2025


This work derives and validates a noise model that encapsulates deadtime of non-paralyzable detectors with random photon arrivals to enable advanced processing, like maximum-likelihood estimation, of high resolution atmospheric lidar profiles while accounting for deadtime bias. This estimator was validated across a wide dynamic range at high resolution (4 millimeters in range, 17 milliseconds in time). Experiments demonstrate that the noise model outperforms the current state-of-the-art for very short time-of-flight (2 nanoseconds) and extended targets (1 microsecond). The proposed noise model also produces accurate deadtime correction for very short integration times. This work sets the foundation for further study into accurate retrievals of high flux and dynamic atmospheric features, e.g., clouds and aerosol layers.
Global Estimation of Range Resolved Thermodynamic Profiles from MicroPulse Differential Absorption Lidar
Feb 27, 2024



We demonstrate thermodynamic profile estimation with data obtained using the MicroPulse DIAL such that the retrieval is entirely self contained. The only external input is surface meteorological variables obtained from a weather station installed on the instrument. The estimator provides products of temperature, absolute humidity and backscatter ratio such that cross dependencies between the lidar data products and raw observations are accounted for and the final products are self consistent. The method described here is applied to a combined oxygen DIAL, potassium HSRL, water vapor DIAL system operating at two pairs of wavelengths (nominally centered at 770 and 828 nm). We perform regularized maximum likelihood estimation through the Poisson Total Variation technique to suppress noise and improve the range of the observations. A comparison to 119 radiosondes indicates that this new processing method produces improved temperature retrievals, reducing total errors to less than 2 K below 3 km altitude and extending the maximum altitude of temperature retrievals to 5 km with less than 3 K error. The results of this work definitively demonstrates the potential for measuring temperature through the oxygen DIAL technique and furthermore that this can be accomplished with low-power semiconductor-based lidar sensors.
2D Signal Estimation for Sparse Distributed Target Photon Counting Data
Nov 29, 2023In this study, we explore the utilization of maximum likelihood estimation for the analysis of sparse photon counting data obtained from distributed target lidar systems. Specifically, we adapt the Poisson Total Variation processing technique to cater to this application. By assuming a Poisson noise model for the photon count observations, our approach yields denoised estimates of backscatter photon flux and related parameters. This facilitates the processing of raw photon counting signals with exceptionally high temporal and range resolutions (demonstrated here to 50 Hz and 75 cm resolutions), including data acquired through time-correlated single photon counting, without significant sacrifice of resolution. Through examination involving both simulated and real-world 2D atmospheric data, our method consistently demonstrates superior accuracy in signal recovery compared to the conventional histogram-based approach commonly employed in distributed target lidar applications.
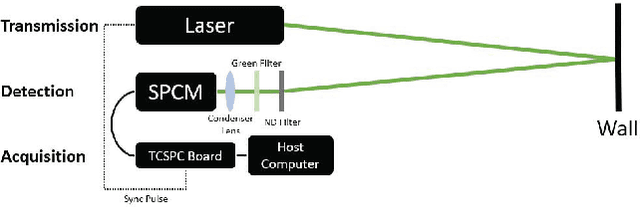
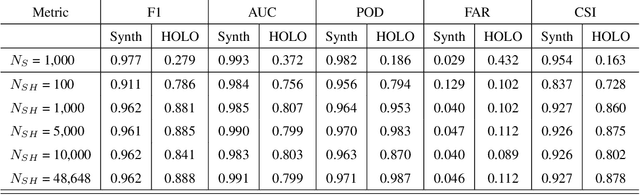
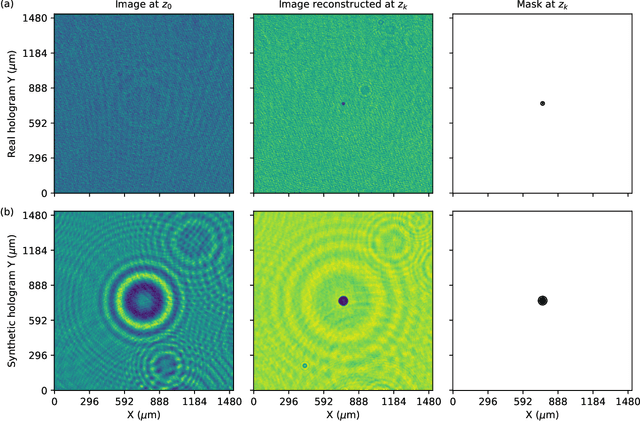
Mimicking non-ideal instrument behavior for hologram processing using neural style translation
Jan 07, 2023Holographic cloud probes provide unprecedented information on cloud particle density, size and position. Each laser shot captures particles within a large volume, where images can be computationally refocused to determine particle size and shape. However, processing these holograms, either with standard methods or with machine learning (ML) models, requires considerable computational resources, time and occasional human intervention. ML models are trained on simulated holograms obtained from the physical model of the probe since real holograms have no absolute truth labels. Using another processing method to produce labels would be subject to errors that the ML model would subsequently inherit. Models perform well on real holograms only when image corruption is performed on the simulated images during training, thereby mimicking non-ideal conditions in the actual probe (Schreck et. al, 2022). Optimizing image corruption requires a cumbersome manual labeling effort. Here we demonstrate the application of the neural style translation approach (Gatys et. al, 2016) to the simulated holograms. With a pre-trained convolutional neural network (VGG-19), the simulated holograms are ``stylized'' to resemble the real ones obtained from the probe, while at the same time preserving the simulated image ``content'' (e.g. the particle locations and sizes). Two image similarity metrics concur that the stylized images are more like real holograms than the synthetic ones. With an ML model trained to predict particle locations and shapes on the stylized data sets, we observed comparable performance on both simulated and real holograms, obviating the need to perform manual labeling. The described approach is not specific to hologram images and could be applied in other domains for capturing noise and imperfections in observational instruments to make simulated data more like real world observations.
Neural network processing of holographic images
Mar 18, 2022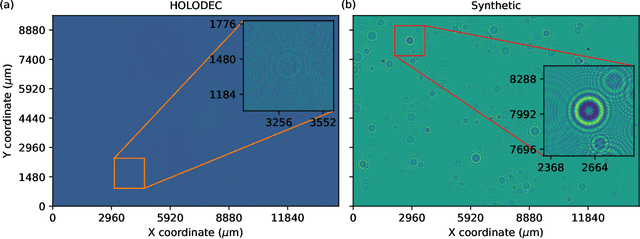
HOLODEC, an airborne cloud particle imager, captures holographic images of a fixed volume of cloud to characterize the types and sizes of cloud particles, such as water droplets and ice crystals. Cloud particle properties include position, diameter, and shape. We present a hologram processing algorithm, HolodecML, that utilizes a neural segmentation model, GPUs, and computational parallelization. HolodecML is trained using synthetically generated holograms based on a model of the instrument, and predicts masks around particles found within reconstructed images. From these masks, the position and size of the detected particles can be characterized in three dimensions. In order to successfully process real holograms, we find we must apply a series of image corrupting transformations and noise to the synthetic images used in training. In this evaluation, HolodecML had comparable position and size estimation performance to the standard processing method, but improved particle detection by nearly 20\% on several thousand manually labeled HOLODEC images. However, the improvement only occurred when image corruption was performed on the simulated images during training, thereby mimicking non-ideal conditions in the actual probe. The trained model also learned to differentiate artifacts and other impurities in the HOLODEC images from the particles, even though no such objects were present in the training data set, while the standard processing method struggled to separate particles from artifacts. The novelty of the training approach, which leveraged noise as a means for parameterizing non-ideal aspects of the HOLODEC detector, could be applied in other domains where the theoretical model is incapable of fully describing the real-world operation of the instrument and accurate truth data required for supervised learning cannot be obtained from real-world observations.