 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural network processing of holographic images
Paper and Code
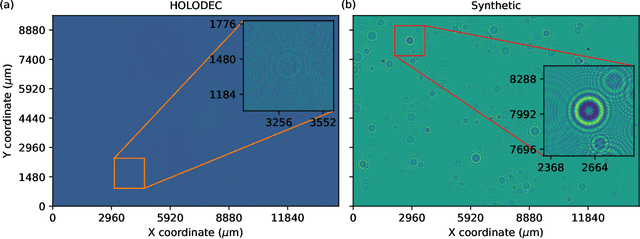
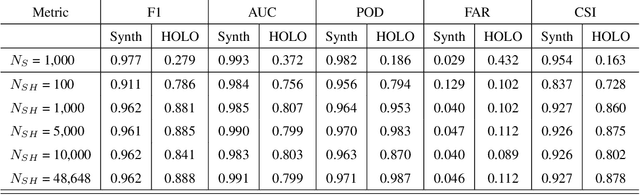
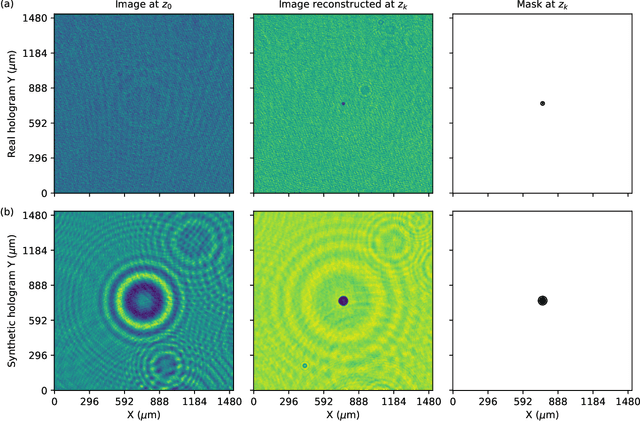
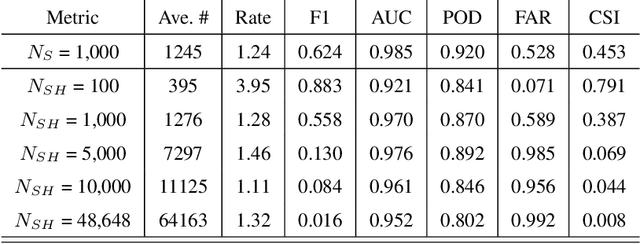
HOLODEC, an airborne cloud particle imager, captures holographic images of a fixed volume of cloud to characterize the types and sizes of cloud particles, such as water droplets and ice crystals. Cloud particle properties include position, diameter, and shape. We present a hologram processing algorithm, HolodecML, that utilizes a neural segmentation model, GPUs, and computational parallelization. HolodecML is trained using synthetically generated holograms based on a model of the instrument, and predicts masks around particles found within reconstructed images. From these masks, the position and size of the detected particles can be characterized in three dimensions. In order to successfully process real holograms, we find we must apply a series of image corrupting transformations and noise to the synthetic images used in training. In this evaluation, HolodecML had comparable position and size estimation performance to the standard processing method, but improved particle detection by nearly 20\% on several thousand manually labeled HOLODEC images. However, the improvement only occurred when image corruption was performed on the simulated images during training, thereby mimicking non-ideal conditions in the actual probe. The trained model also learned to differentiate artifacts and other impurities in the HOLODEC images from the particles, even though no such objects were present in the training data set, while the standard processing method struggled to separate particles from artifacts. The novelty of the training approach, which leveraged noise as a means for parameterizing non-ideal aspects of the HOLODEC detector, could be applied in other domains where the theoretical model is incapable of fully describing the real-world operation of the instrument and accurate truth data required for supervised learning cannot be obtained from real-world observations.