 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Assurance for Quadrotor Kinodynamic Motion Planning
Jul 23, 2025Autonomous drones have gained considerable attention for applications in real-world scenarios, such as search and rescue, inspection, and delivery. As their use becomes ever more pervasive in civilian applications, failure to ensure safe operation can lead to physical damage to the system, environmental pollution, and even loss of human life. Recent work has demonstrated that motion planning techniques effectively generate a collision-free trajectory during navigation. However, these methods, while creating the motion plans, do not inherently consider the safe operational region of the system, leading to potential safety constraints violation during deployment. In this paper, we propose a method that leverages run time safety assurance in a kinodynamic motion planning scheme to satisfy the system's operational constraints. First, we use a sampling-based geometric planner to determine a high-level collision-free path within a user-defined space. Second, we design a low-level safety assurance filter to provide safety guarantees to the control input of a Linear Quadratic Regulator (LQR) designed with the purpose of trajectory tracking. We demonstrate our proposed approach in a restricted 3D simulation environment using a model of the Crazyflie 2.0 drone.
Testing Spacecraft Formation Flying with Crazyflie Drones as Satellite Surrogates
Feb 22, 2024



As the space domain becomes increasingly congested, autonomy is proposed as one approach to enable small numbers of human ground operators to manage large constellations of satellites and tackle more complex missions such as on-orbit or in-space servicing, assembly, and manufacturing. One of the biggest challenges in developing novel spacecraft autonomy is mechanisms to test and evaluate their performance. Testing spacecraft autonomy on-orbit can be high risk and prohibitively expensive. An alternative method is to test autonomy terrestrially using satellite surrogates such as attitude test beds on air bearings or drones for translational motion visualization. Against this background, this work develops an approach to evaluate autonomous spacecraft behavior using a surrogate platform, namely a micro-quadcopter drone developed by the Bitcraze team, the Crazyflie 2.1. The Crazyflie drones are increasingly becoming ubiquitous in flight testing labs because they are affordable, open source, readily available, and include expansion decks which allow for features such as positioning systems, distance and/or motion sensors, wireless charging, and AI capabilities. In this paper, models of Crazyflie drones are used to simulate the relative motion dynamics of spacecraft under linearized Clohessy-Wiltshire dynamics in elliptical natural motion trajectories, in pre-generated docking trajectories, and via trajectories output by neural network control systems.
Model Predictive Control (MPC) of an Artificial Pancreas with Data-Driven Learning of Multi-Step-Ahead Blood Glucose Predictors
Jul 22, 2023We present the design and \textit{in-silico} evaluation of a closed-loop insulin delivery algorithm to treat type 1 diabetes (T1D) consisting in a data-driven multi-step-ahead blood glucose (BG) predictor integrated into a Linear Time-Varying (LTV) Model Predictive Control (MPC) framework. Instead of identifying an open-loop model of the glucoregulatory system from available data, we propose to directly fit the entire BG prediction over a predefined prediction horizon to be used in the MPC, as a nonlinear function of past input-ouput data and an affine function of future insulin control inputs. For the nonlinear part, a Long Short-Term Memory (LSTM) network is proposed, while for the affine component a linear regression model is chosen. To assess benefits and drawbacks when compared to a traditional linear MPC based on an auto-regressive with exogenous (ARX) input model identified from data, we evaluated the proposed LSTM-MPC controller in three simulation scenarios: a nominal case with 3 meals per day, a random meal disturbances case where meals were generated with a recently published meal generator, and a case with 25$\%$ decrease in the insulin sensitivity. Further, in all the scenarios, no feedforward meal bolus was administered. For the more challenging random meal generation scenario, the mean $\pm$ standard deviation percent time in the range 70-180 [mg/dL] was 74.99 $\pm$ 7.09 vs. 54.15 $\pm$ 14.89, the mean $\pm$ standard deviation percent time in the tighter range 70-140 [mg/dL] was 47.78$\pm$8.55 vs. 34.62 $\pm$9.04, while the mean $\pm$ standard deviation percent time in sever hypoglycemia, i.e., $<$ 54 [mg/dl] was 1.00$\pm$3.18 vs. 9.45$\pm$11.71, for our proposed LSTM-MPC controller and the traditional ARX-MPC, respectively. Our approach provided accurate predictions of future glucose concentrations and good closed-loop performances of the overall MPC controller.
Basal-Bolus Advisor for Type 1 Diabetes Patients Using Multi-Agent Reinforcement Learning Methodology
Jul 17, 2023
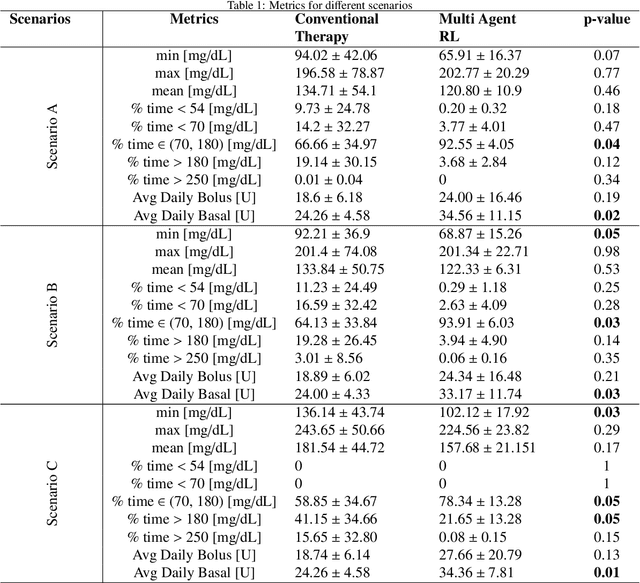

This paper presents a novel multi-agent reinforcement learning (RL) approach for personalized glucose control in individuals with type 1 diabetes (T1D). The method employs a closed-loop system consisting of a blood glucose (BG) metabolic model and a multi-agent soft actor-critic RL model acting as the basal-bolus advisor. Performance evaluation is conducted in three scenarios, comparing the RL agents to conventional therapy. Evaluation metrics include glucose levels (minimum, maximum, and mean), time spent in different BG ranges, and average daily bolus and basal insulin dosages. Results demonstrate that the RL-based basal-bolus advisor significantly improves glucose control, reducing glycemic variability and increasing time spent within the target range (70-180 mg/dL). Hypoglycemia events are effectively prevented, and severe hyperglycemia events are reduced. The RL approach also leads to a statistically significant reduction in average daily basal insulin dosage compared to conventional therapy. These findings highlight the effectiveness of the multi-agent RL approach in achieving better glucose control and mitigating the risk of severe hyperglycemia in individuals with T1D.
Modeling Physical Activity Impact on Glucose Dynamics in People with Type 1 Diabetes for a Fully Automated Artificial Pancreas
Jul 16, 2023



In this paper, models of the blood glucose (BG) dynamics in people with Type 1 diabetes (T1D) in response to moderate intensity aerobic activity are derived from physiology-based first principles and system identification experiments. We show that by enhancing insulin-dependent glucose utilization by the tissues in two phases, a rapid short-term increase in insulin-independent glucose clearance and augmented glucose uptake, and a long-term sustained increase sensitivity to insulin action, a metabolic model able to reproduce the effects of activity on glucose disposal is obtained. Second, a control-oriented transfer function model is proposed to predict the BG response to an exercise bout modeled as a step change in heart rate (HR). Results comparing model predictions with actual patients data collected in a series of experimental sessions including physical activity (PA) are presented. The findings will contribute to the design of a fully automated closed-loop for improved glucose control in conditions of daily life for people with T1D.
Neurological Status Classification Using Convolutional Neural Network
Apr 01, 2021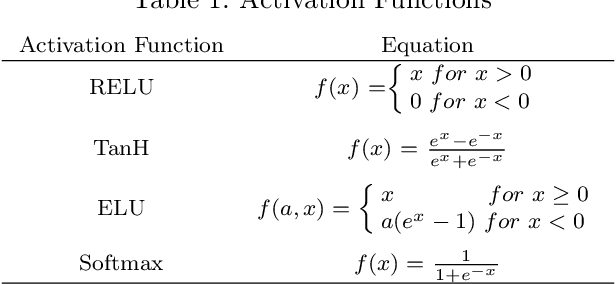
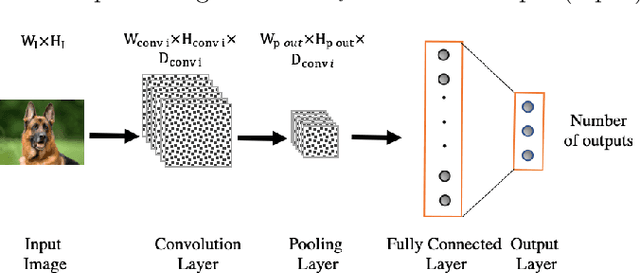

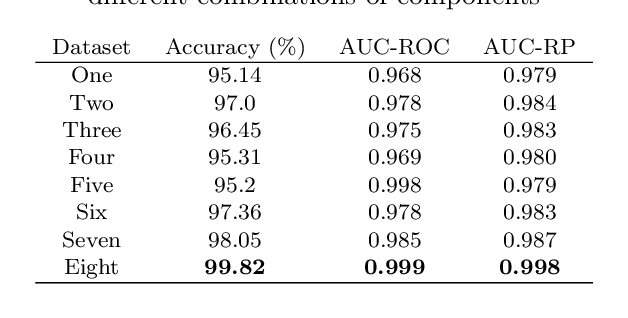
In this study we show that a Convolutional Neural Network (CNN) model is able to accuratelydiscriminate between 4 different phases of neurological status in a non-Electroencephalogram(EEG) dataset recorded in an experiment in which subjects are exposed to physical, cognitiveand emotional stress. We demonstrate that the proposed model is able to obtain 99.99% AreaUnder the Curve (AUC) of Receiver Operation characteristic (ROC) and 99.82% classificationaccuracy on the test dataset. Furthermore, for comparison, we show that our models outperformstraditional classification methods such as SVM, and RF. Finally, we show the advantage of CNN models, in comparison to other methods, in robustness to noise by 97.46% accuracy on a noisy dataset.