 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCNN for IMU Assisted Odometry Estimation using Velodyne LiDAR
Dec 18, 2017
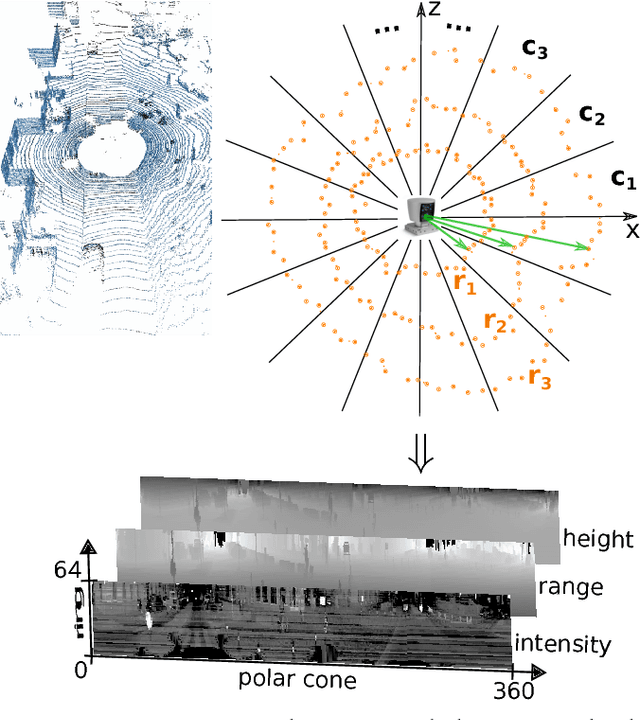
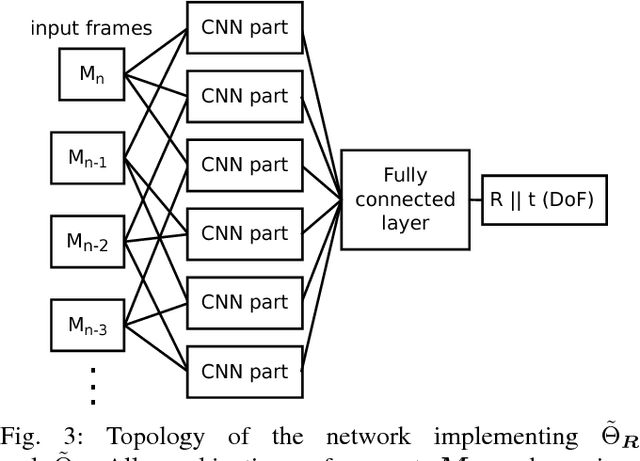
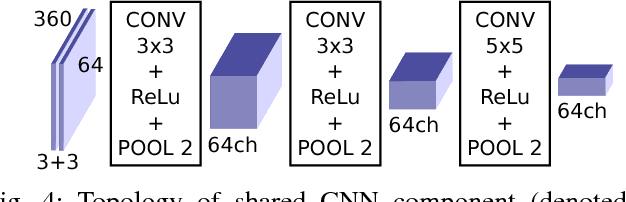
We introduce a novel method for odometry estimation using convolutional neural networks from 3D LiDAR scans. The original sparse data are encoded into 2D matrices for the training of proposed networks and for the prediction. Our networks show significantly better precision in the estimation of translational motion parameters comparing with state of the art method LOAM, while achieving real-time performance. Together with IMU support, high quality odometry estimation and LiDAR data registration is realized. Moreover, we propose alternative CNNs trained for the prediction of rotational motion parameters while achieving results also comparable with state of the art. The proposed method can replace wheel encoders in odometry estimation or supplement missing GPS data, when the GNSS signal absents (e.g. during the indoor mapping). Our solution brings real-time performance and precision which are useful to provide online preview of the mapping results and verification of the map completeness in real time.
CNN for Very Fast Ground Segmentation in Velodyne LiDAR Data
Sep 07, 2017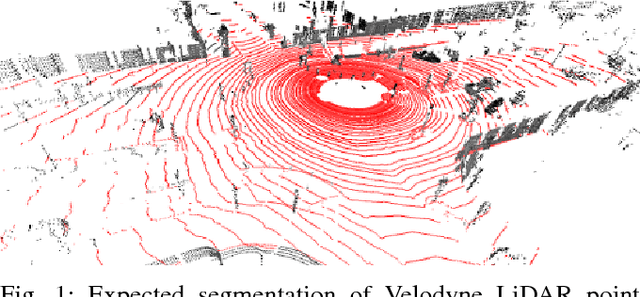
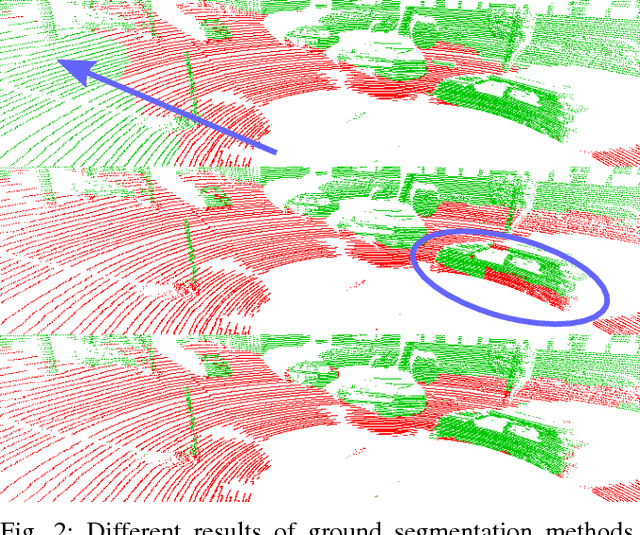
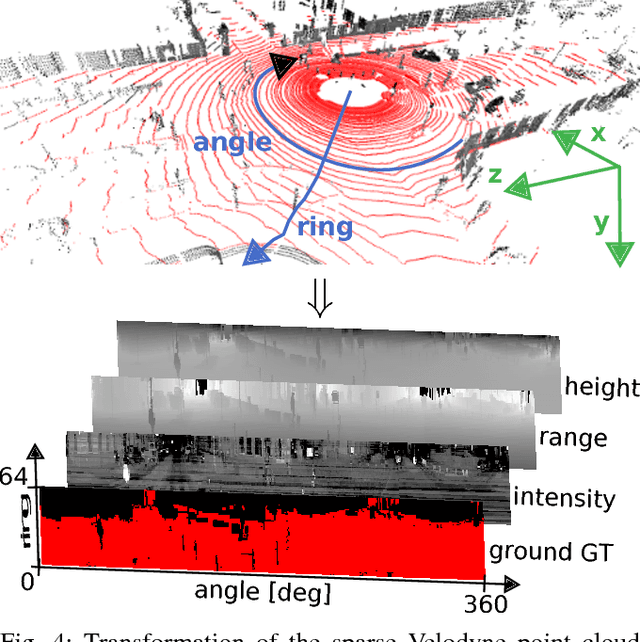
This paper presents a novel method for ground segmentation in Velodyne point clouds. We propose an encoding of sparse 3D data from the Velodyne sensor suitable for training a convolutional neural network (CNN). This general purpose approach is used for segmentation of the sparse point cloud into ground and non-ground points. The LiDAR data are represented as a multi-channel 2D signal where the horizontal axis corresponds to the rotation angle and the vertical axis the indexes channels (i.e. laser beams). Multiple topologies of relatively shallow CNNs (i.e. 3-5 convolutional layers) are trained and evaluated using a manually annotated dataset we prepared. The results show significant improvement of performance over the state-of-the-art method by Zhang et al. in terms of speed and also minor improvements in terms of accuracy.