 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Visual Understanding for Cognition and Manipulation -- A primer for the roboticist
May 13, 2019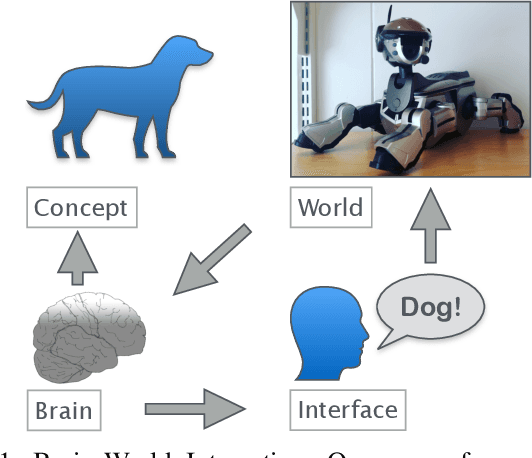
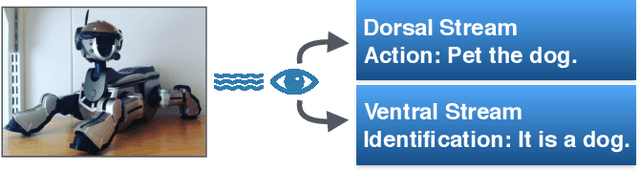
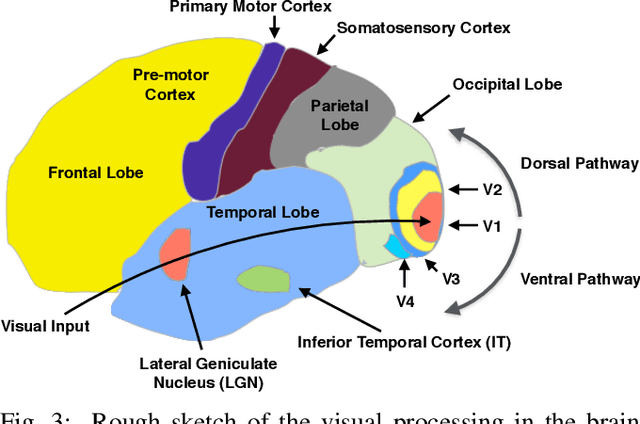
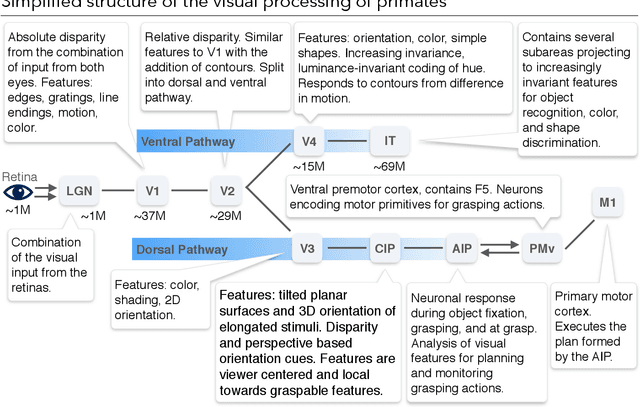
Robotic research is often built on approaches that are motivated by insights from self-examination of how we interface with the world. However, given current theories about human cognition and sensory processing, it is reasonable to assume that the internal workings of the brain are separate from how we interface with the world and ourselves. To amend some of these misconceptions arising from self-examination this article reviews human visual understanding for cognition and action, specifically manipulation. Our focus is on identifying overarching principles such as the separation into visual processing for action and cognition, hierarchical processing of visual input, and the contextual and anticipatory nature of visual processing for action. We also provide a rudimentary exposition of previous theories about visual understanding that shows how self-examination can lead down the wrong path. Our hope is that the article will provide insights for the robotic researcher that can help them navigate the path of self-examination, give them an overview of current theories about human visual processing, as well as provide a source for further relevant reading.
Invariant Feature Mappings for Generalizing Affordance Understanding Using Regularized Metric Learning
Jan 30, 2019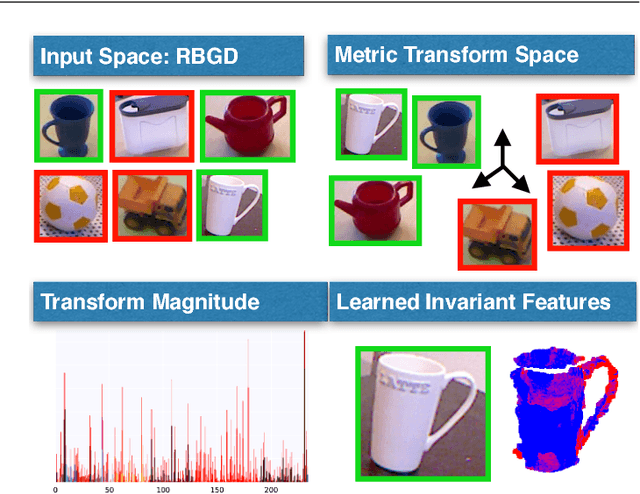
This paper presents an approach for learning invariant features for object affordance understanding. One of the major problems for a robotic agent acquiring a deeper understanding of affordances is finding sensory-grounded semantics. Being able to understand what in the representation of an object makes the object afford an action opens up for more efficient manipulation, interchange of objects that visually might not be similar, transfer learning, and robot to human communication. Our approach uses a metric learning algorithm that learns a feature transform that encourages objects that affords the same action to be close in the feature space. We regularize the learning, such that we penalize irrelevant features, allowing the agent to link what in the sensory input caused the object to afford the action. From this, we show how the agent can abstract the affordance and reason about the similarity between different affordances.