 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling the Formation of Social Conventions in Multi-Agent Populations
Feb 16, 2018
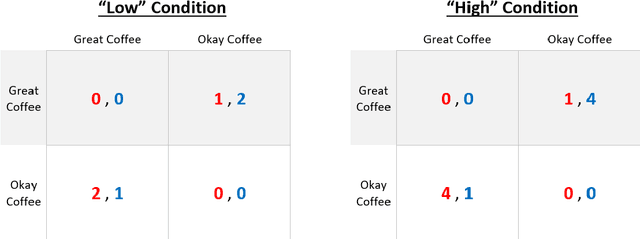
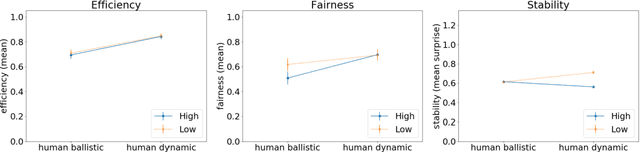

In order to understand the formation of social conventions we need to know the specific role of control and learning in multi-agent systems. To advance in this direction, we propose, within the framework of the Distributed Adaptive Control (DAC) theory, a novel Control-based Reinforcement Learning architecture (CRL) that can account for the acquisition of social conventions in multi-agent populations that are solving a benchmark social decision-making problem. Our new CRL architecture, as a concrete realization of DAC multi-agent theory, implements a low-level sensorimotor control loop handling the agent's reactive behaviors (pre-wired reflexes), along with a layer based on model-free reinforcement learning that maximizes long-term reward. We apply CRL in a multi-agent game-theoretic task in which coordination must be achieved in order to find an optimal solution. We show that our CRL architecture is able to both find optimal solutions in discrete and continuous time and reproduce human experimental data on standard game-theoretic metrics such as efficiency in acquiring rewards, fairness in reward distribution and stability of convention formation.
The Morphospace of Consciousness
Jun 08, 2017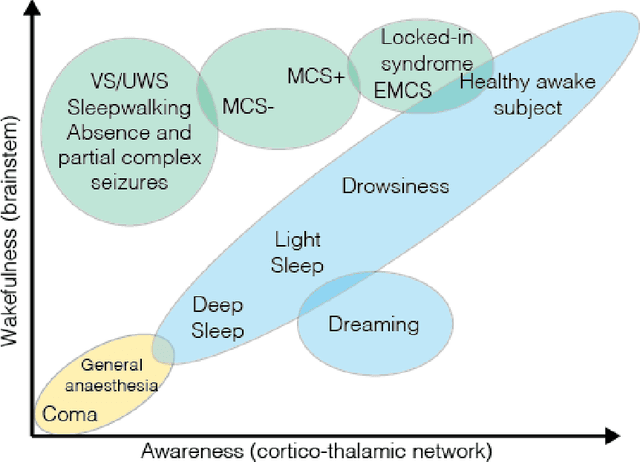
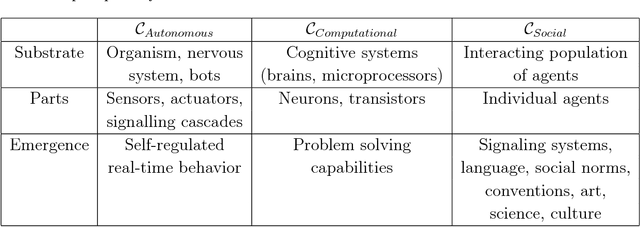
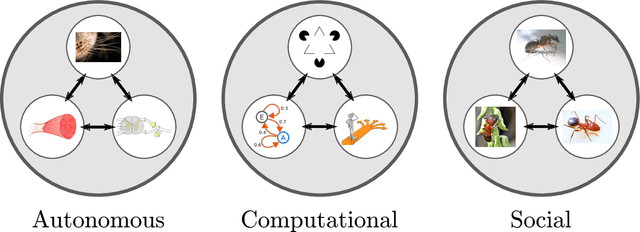
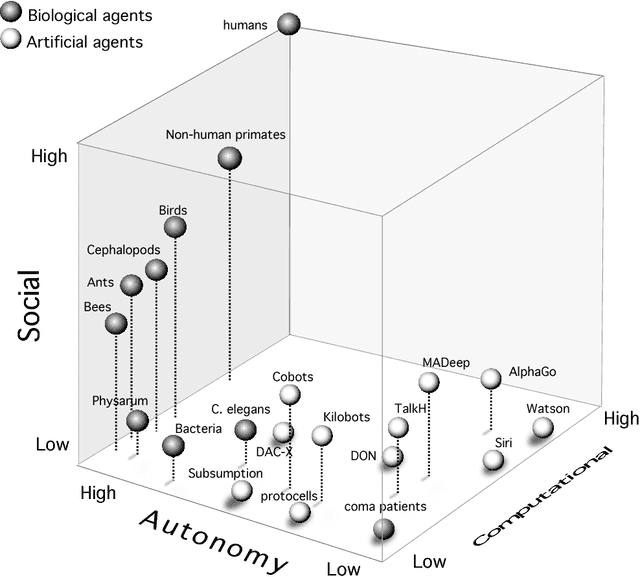
Given recent proposals to synthesize consciousness, how many forms of conscious machines can one distinguish and on what grounds? Based on current clinical scales of consciousness, that measure cognitive awareness and wakefulness, we take a perspective on how contemporary artificially intelligent machines and synthetically engineered life forms would measure on these scales. To do so, we argue that awareness and wakefulness can be associated to computational and autonomous complexity respectively. Then, building on insights from cognitive robotics, we ask what function consciousness serves, and interpret it as an evolutionary game-theoretic strategy. We make the case for a third type of complexity necessary for describing consciousness, namely, social complexity. Having identified these complexity types, allows us to represent both, biological and synthetic systems in a common morphospace. This suggests an embodiment-based taxonomy of consciousness. In particular, we distinguish four forms of consciousness, based on embodiment: biological, synthetic, group (resulting from group interactions) and simulated consciousness (embodied by virtual agents within a simulated reality). Such a taxonomy is useful for studying comparative signatures of consciousness across domains, in order to highlight design principles necessary to engineer conscious machines. This is particularly relevant in the light of recent developments at the crossroads of neuroscience, biomedical engineering, artificial intelligence and biomimetics.