 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNaviHydra: Controllable Navigation-guided End-to-end Autonomous Driving with Hydra-distillation
Dec 11, 2025



The complexity of autonomous driving scenarios requires robust models that can interpret high-level navigation commands and generate safe trajectories. While traditional rule-based systems can react to these commands, they often struggle in dynamic environments, and end-to-end methods face challenges in complying with explicit navigation commands. To address this, we present NaviHydra, a controllable navigation-guided end-to-end model distilled from an existing rule-based simulator. Our framework accepts high-level navigation commands as control signals, generating trajectories that align with specified intentions. We utilize a Bird's Eye View (BEV) based trajectory gathering method to enhance the trajectory feature extraction. Additionally, we introduce a novel navigation compliance metric to evaluate adherence to intended route, improving controllability and navigation safety. To comprehensively assess our model's controllability, we design a test that evaluates its response to various navigation commands. Our method significantly outperforms baseline models, achieving state-of-the-art results in the NAVSIM benchmark, demonstrating its effectiveness in advancing autonomous driving.
FlowDrive: moderated flow matching with data balancing for trajectory planning
Sep 26, 2025Learning-based planners are sensitive to the long-tailed distribution of driving data. Common maneuvers dominate datasets, while dangerous or rare scenarios are sparse. This imbalance can bias models toward the frequent cases and degrade performance on critical scenarios. To tackle this problem, we compare balancing strategies for sampling training data and find reweighting by trajectory pattern an effective approach. We then present FlowDrive, a flow-matching trajectory planner that learns a conditional rectified flow to map noise directly to trajectory distributions with few flow-matching steps. We further introduce moderated, in-the-loop guidance that injects small perturbation between flow steps to systematically increase trajectory diversity while remaining scene-consistent. On nuPlan and the interaction-focused interPlan benchmarks, FlowDrive achieves state-of-the-art results among learning-based planners and approaches methods with rule-based refinements. After adding moderated guidance and light post-processing (FlowDrive*), it achieves overall state-of-the-art performance across nearly all benchmark splits.
RetroMotion: Retrocausal Motion Forecasting Models are Instructable
May 26, 2025Motion forecasts of road users (i.e., agents) vary in complexity as a function of scene constraints and interactive behavior. We address this with a multi-task learning method for motion forecasting that includes a retrocausal flow of information. The corresponding tasks are to forecast (1) marginal trajectory distributions for all modeled agents and (2) joint trajectory distributions for interacting agents. Using a transformer model, we generate the joint distributions by re-encoding marginal distributions followed by pairwise modeling. This incorporates a retrocausal flow of information from later points in marginal trajectories to earlier points in joint trajectories. Per trajectory point, we model positional uncertainty using compressed exponential power distributions. Notably, our method achieves state-of-the-art results in the Waymo Interaction Prediction dataset and generalizes well to the Argoverse 2 dataset. Additionally, our method provides an interface for issuing instructions through trajectory modifications. Our experiments show that regular training of motion forecasting leads to the ability to follow goal-based instructions and to adapt basic directional instructions to the scene context. Code: https://github.com/kit-mrt/future-motion
SceneMotion: From Agent-Centric Embeddings to Scene-Wide Forecasts
Aug 02, 2024



Self-driving vehicles rely on multimodal motion forecasts to effectively interact with their environment and plan safe maneuvers. We introduce SceneMotion, an attention-based model for forecasting scene-wide motion modes of multiple traffic agents. Our model transforms local agent-centric embeddings into scene-wide forecasts using a novel latent context module. This module learns a scene-wide latent space from multiple agent-centric embeddings, enabling joint forecasting and interaction modeling. The competitive performance in the Waymo Open Interaction Prediction Challenge demonstrates the effectiveness of our approach. Moreover, we cluster future waypoints in time and space to quantify the interaction between agents. We merge all modes and analyze each mode independently to determine which clusters are resolved through interaction or result in conflict. Our implementation is available at: https://github.com/kit-mrt/future-motion
MAP-Former: Multi-Agent-Pair Gaussian Joint Prediction
Apr 30, 2024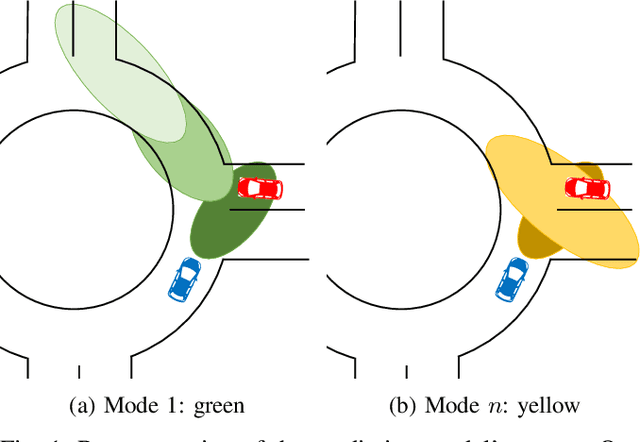
There is a gap in risk assessment of trajectories between the trajectory information coming from a traffic motion prediction module and what is actually needed. Closing this gap necessitates advancements in prediction beyond current practices. Existing prediction models yield joint predictions of agents' future trajectories with uncertainty weights or marginal Gaussian probability density functions (PDFs) for single agents. Although, these methods achieve high accurate trajectory predictions, they only provide little or no information about the dependencies of interacting agents. Since traffic is a process of highly interdependent agents, whose actions directly influence their mutual behavior, the existing methods are not sufficient to reliably assess the risk of future trajectories. This paper addresses that gap by introducing a novel approach to motion prediction, focusing on predicting agent-pair covariance matrices in a ``scene-centric'' manner, which can then be used to model Gaussian joint PDFs for all agent-pairs in a scene. We propose a model capable of predicting those agent-pair covariance matrices, leveraging an enhanced awareness of interactions. Utilizing the prediction results of our model, this work forms the foundation for comprehensive risk assessment with statistically based methods for analyzing agents' relations by their joint PDFs.