 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Means Left: Political Bias in Large Language Models Increases with Their Number of Parameters
May 07, 2025With the increasing prevalence of artificial intelligence, careful evaluation of inherent biases needs to be conducted to form the basis for alleviating the effects these predispositions can have on users. Large language models (LLMs) are predominantly used by many as a primary source of information for various topics. LLMs frequently make factual errors, fabricate data (hallucinations), or present biases, exposing users to misinformation and influencing opinions. Educating users on their risks is key to responsible use, as bias, unlike hallucinations, cannot be caught through data verification. We quantify the political bias of popular LLMs in the context of the recent vote of the German Bundestag using the score produced by the Wahl-O-Mat. This metric measures the alignment between an individual's political views and the positions of German political parties. We compare the models' alignment scores to identify factors influencing their political preferences. Doing so, we discover a bias toward left-leaning parties, most dominant in larger LLMs. Also, we find that the language we use to communicate with the models affects their political views. Additionally, we analyze the influence of a model's origin and release date and compare the results to the outcome of the recent vote of the Bundestag. Our results imply that LLMs are prone to exhibiting political bias. Large corporations with the necessary means to develop LLMs, thus, knowingly or unknowingly, have a responsibility to contain these biases, as they can influence each voter's decision-making process and inform public opinion in general and at scale.
Assessing Political Bias in Large Language Models
May 17, 2024



The assessment of societal biases within Large Language Models (LLMs) has emerged as a critical concern in the contemporary discourse surrounding Artificial Intelligence (AI) ethics and their impact. Especially, recognizing and considering political biases is important for practical applications to gain a deeper understanding of the possibilities and behaviors and to prevent unwanted statements. As the upcoming elections of the European Parliament will not remain unaffected by LLMs, we evaluate the bias of the current most popular open-source models concerning political issues within the European Union (EU) from a German perspective. To do so, we use the "Wahl-O-Mat", a voting advice application used in Germany, to determine which political party is the most aligned for the respective LLM. We show that larger models, such as Llama3-70B, tend to align more closely with left-leaning political parties like GR\"UNE and Volt, while smaller models often remain neutral, particularly in English. This highlights the nuanced behavior of LLMs and the importance of language in shaping their political stances. Our findings underscore the importance of rigorously assessing and addressing societal bias in LLMs to safeguard the integrity and fairness of applications that employ the power of modern machine learning methods.
Defensive Perception: Estimation and Monitoring of Neural Network Performance under Deployment
Aug 11, 2023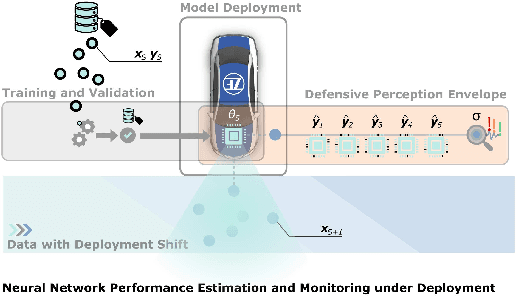


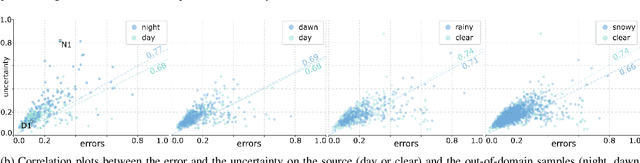
In this paper, we propose a method for addressing the issue of unnoticed catastrophic deployment and domain shift in neural networks for semantic segmentation in autonomous driving. Our approach is based on the idea that deep learning-based perception for autonomous driving is uncertain and best represented as a probability distribution. As autonomous vehicles' safety is paramount, it is crucial for perception systems to recognize when the vehicle is leaving its operational design domain, anticipate hazardous uncertainty, and reduce the performance of the perception system. To address this, we propose to encapsulate the neural network under deployment within an uncertainty estimation envelope that is based on the epistemic uncertainty estimation through the Monte Carlo Dropout approach. This approach does not require modification of the deployed neural network and guarantees expected model performance. Our defensive perception envelope has the capability to estimate a neural network's performance, enabling monitoring and notification of entering domains of reduced neural network performance under deployment. Furthermore, our envelope is extended by novel methods to improve the application in deployment settings, including reducing compute expenses and confining estimation noise. Finally, we demonstrate the applicability of our method for multiple different potential deployment shifts relevant to autonomous driving, such as transitions into the night, rainy, or snowy domain. Overall, our approach shows great potential for application in deployment settings and enables operational design domain recognition via uncertainty, which allows for defensive perception, safe state triggers, warning notifications, and feedback for testing or development and adaptation of the perception stack.
Distributed traffic light control at uncoupled intersections with real-world topology by deep reinforcement learning
Nov 27, 2018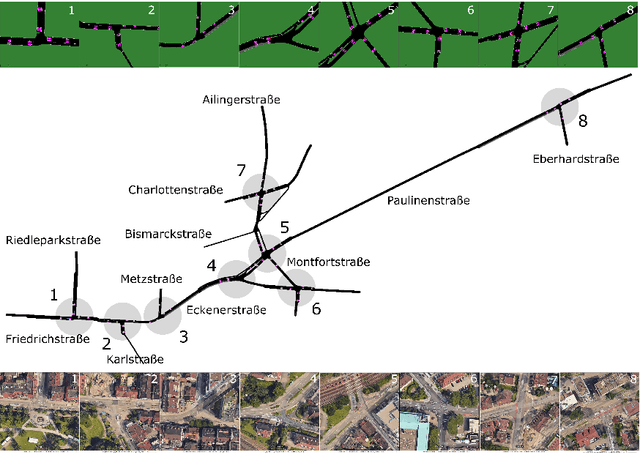
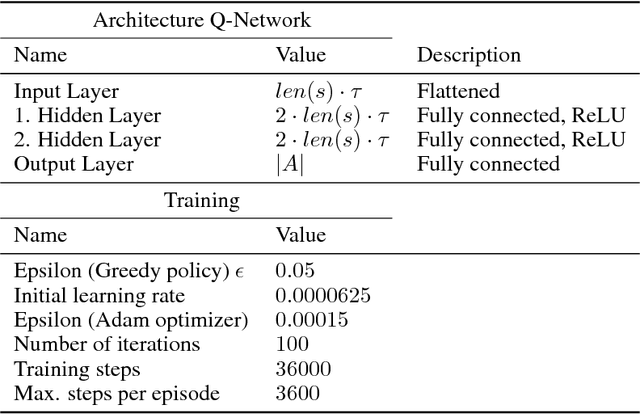
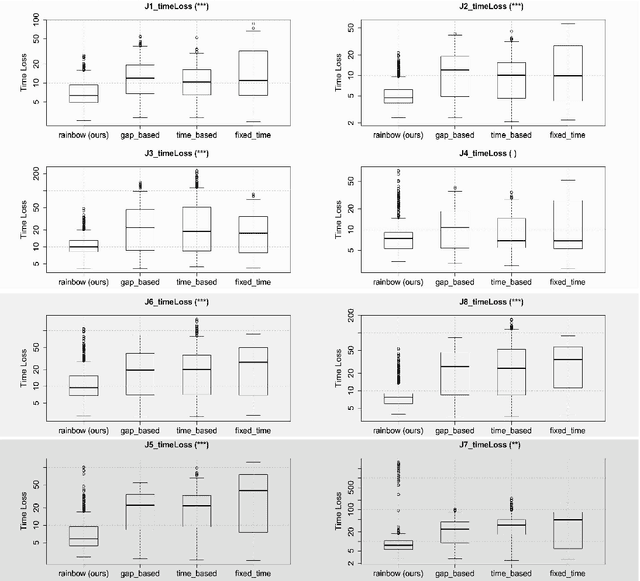
This work examines the implications of uncoupled intersections with local real-world topology and sensor setup on traffic light control approaches. Control approaches are evaluated with respect to: Traffic flow, fuel consumption and noise emission at intersections. The real-world road network of Friedrichshafen is depicted, preprocessed and the present traffic light controlled intersections are modeled with respect to state space and action space. Different strategies, containing fixed-time, gap-based and time-based control approaches as well as our deep reinforcement learning based control approach, are implemented and assessed. Our novel DRL approach allows for modeling the TLC action space, with respect to phase selection as well as selection of transition timings. It was found that real-world topologies, and thus irregularly arranged intersections have an influence on the performance of traffic light control approaches. This is even to be observed within the same intersection types (n-arm, m-phases). Moreover we could show, that these influences can be efficiently dealt with by our deep reinforcement learning based control approach.
Transfer Learning versus Multi-agent Learning regarding Distributed Decision-Making in Highway Traffic
Oct 19, 2018
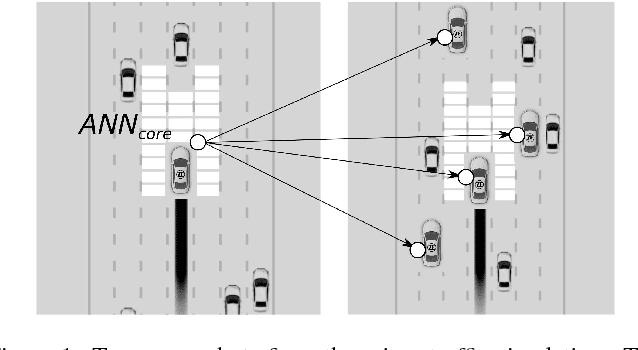
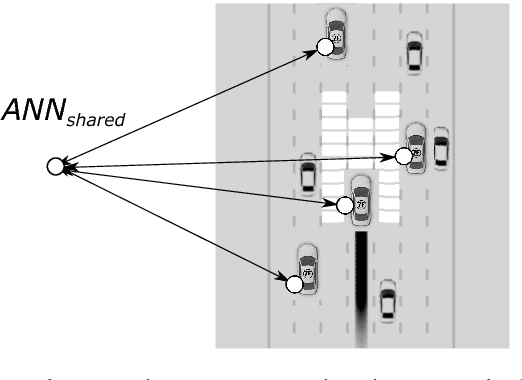
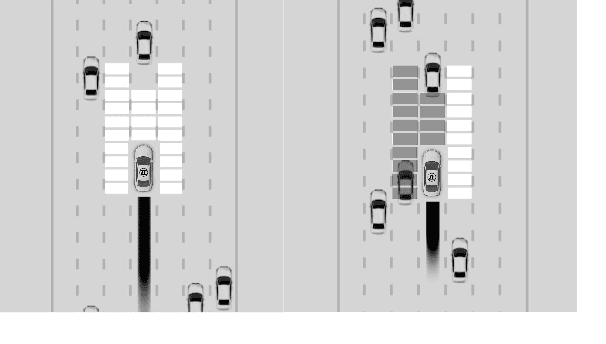
Transportation and traffic are currently undergoing a rapid increase in terms of both scale and complexity. At the same time, an increasing share of traffic participants are being transformed into agents driven or supported by artificial intelligence resulting in mixed-intelligence traffic. This work explores the implications of distributed decision-making in mixed-intelligence traffic. The investigations are carried out on the basis of an online-simulated highway scenario, namely the MIT \emph{DeepTraffic} simulation. In the first step traffic agents are trained by means of a deep reinforcement learning approach, being deployed inside an elitist evolutionary algorithm for hyperparameter search. The resulting architectures and training parameters are then utilized in order to either train a single autonomous traffic agent and transfer the learned weights onto a multi-agent scenario or else to conduct multi-agent learning directly. Both learning strategies are evaluated on different ratios of mixed-intelligence traffic. The strategies are assessed according to the average speed of all agents driven by artificial intelligence. Traffic patterns that provoke a reduction in traffic flow are analyzed with respect to the different strategies.
* Proc. of the 10th International Workshop on Agents in Traffic and Transportation (ATT 2018), co-located with ECAI/IJCAI, AAMAS and ICML 2018 conferences (FAIM 2018)