 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntensity Discriminability of Electrocutaneous and Intraneural Stimulation Pulse Frequency in Intact Individuals and Amputees
Jan 23, 2020



Electrical stimulation of residual nerves can be used to provide amputees with intuitive sensory feedback. An important aspect of this artificial sensory feedback is the ability to convey the magnitude of tactile stimuli. Using classical psychophysical methods, we quantified the just-noticeable differences for electrocutaneous stimulation pulse frequency in both intact participants and one transradial amputee. For the transradial amputee, we also quantified the just-noticeable difference of intraneural microstimulation pulse frequency via chronically implanted Utah Slanted Electrode Arrays. We demonstrate that intensity discrimination is similar across conditions: intraneural microstimulation of the residual nerves, electrocutaneous stimulation of the reinnervated skin on the residual limb, and electrocutaneous stimulation of intact hands. We also show that intensity discrimination performance is significantly better at lower pulse frequencies than at higher ones - a finding that's unique to electrocutaneous and intraneural stimulation and suggests that supplemental sensory cues may be present at lower pulse frequencies. These results can help guide the implementation of artificial sensory feedback for sensorized bionic arms.
Inexpensive and Portable System for Dexterous High-Density Myoelectric Control of Multiarticulate Prostheses
Jan 23, 2020



Multiarticulate bionic arms are now capable of mimicking the endogenous movements of the human hand. 3D-printing has reduced the cost of prosthetic hands themselves, but there is currently no low-cost alternative to dexterous electromyographic (EMG) control systems. To address this need, we developed an inexpensive (~$675) and portable EMG control system by integrating low-cost microcontrollers with an EMG acquisition device. We validated signal acquisition by comparing the signal-to-noise ratio (SNR) of our system with that of a high-end research-grade system. We also demonstrate the ability to use the low-cost control system for proportional and independent control of various prosthetic hands in real-time. We found that the SNR of the low-cost control system was statistically no worse than 44% of the SNR of a research-grade control system. The RMSEs of predicted hand movements (from a modified Kalman filter) were typically a few percent better than, and not more than 6% worse than, RMSEs of a research-grade system for up to six degrees of freedom when only relatively few (six) EMG electrodes were used. However, RMSEs were generally higher than RMSEs of research-grade systems that utilize considerably more (32) EMG electrodes, guiding future work towards increasing electrode count. Successful instantiation of this low-cost control system constitutes an important step towards the commercialization and wide-spread availability of dexterous bionic hands.
Intuitive Neuromyoelectric Control of a Dexterous Bionic Arm Using a Modified Kalman Filter
Oct 10, 2019
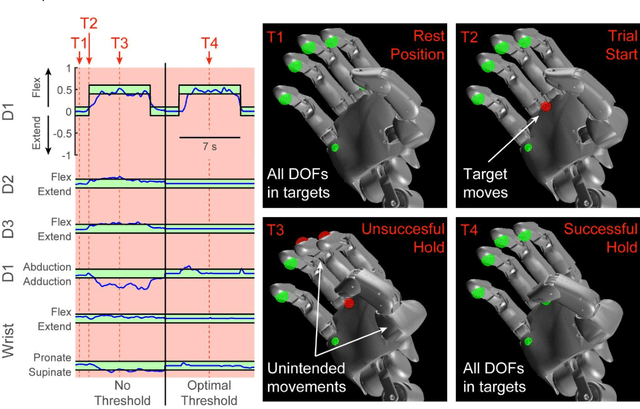
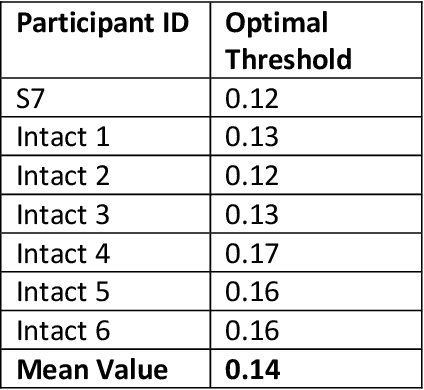
Background: Multi-articulate prostheses are capable of performing dexterous hand movements. However, clinically available control strategies fail to provide users with intuitive, independent and proportional control over multiple degrees of freedom (DOFs) in real-time. New Method: We detail the use of a modified Kalman filter (MKF) to provide intuitive, independent and proportional control over six-DOF prostheses such as the DEKA "LUKE" Arm. Input features include neural firing rates recorded from Utah Slanted Electrode Arrays and mean absolute value of intramuscular electromyographic (EMG) recordings. Ad-hoc modifications include thresholds and non-unity gains on the output of a Kalman filter. Results: We demonstrate that both neural and EMG data can be combined effectively. We also highlight that modifications can be optimized to significantly improve performance relative to an unmodified Kalman filter. Thresholds significantly reduced unintended movement and promoted more independent control of the different DOFs. Gain were significantly greater than one and served to amplify participant effort. Optimal modifications can be determined quickly offline and translate to functional improvements online. Using a portable take-home system, participants performed various activities of daily living. Comparison with Existing Methods: In contrast to pattern recognition, the MKF allows users to continuously modulate their force output, which is critical for fine dexterity. The MKF is also computationally efficient and can be trained in less than five minutes. Conclusions: The MKF can be used to explore the functional and psychological benefits associated with long-term, at-home control of dexterous prosthetic hands.
A Modular Transradial Bypass Socket for Surface Myoelectric Prosthetic Control in Non-Amputees
Sep 26, 2019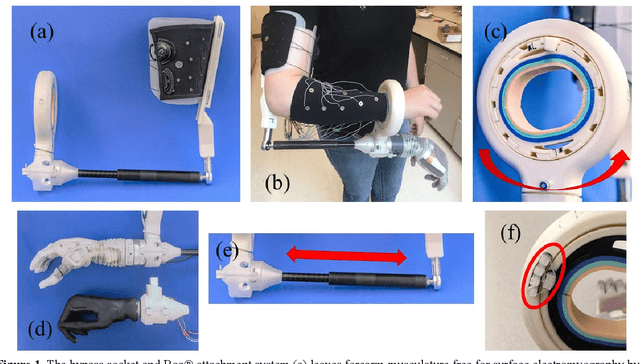
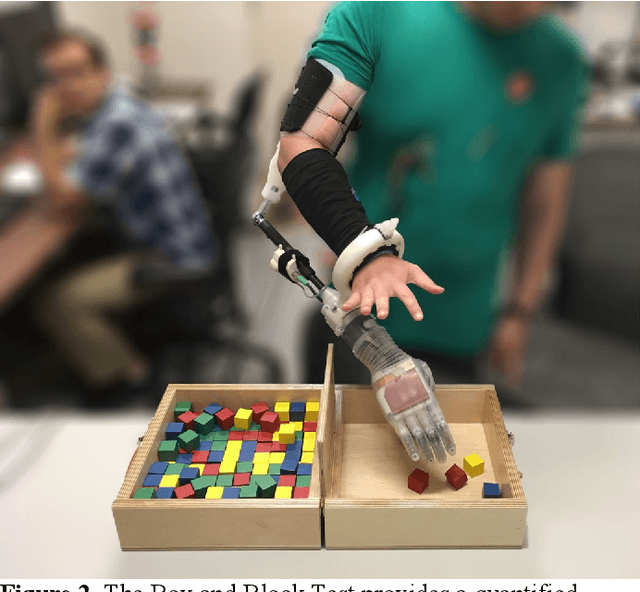
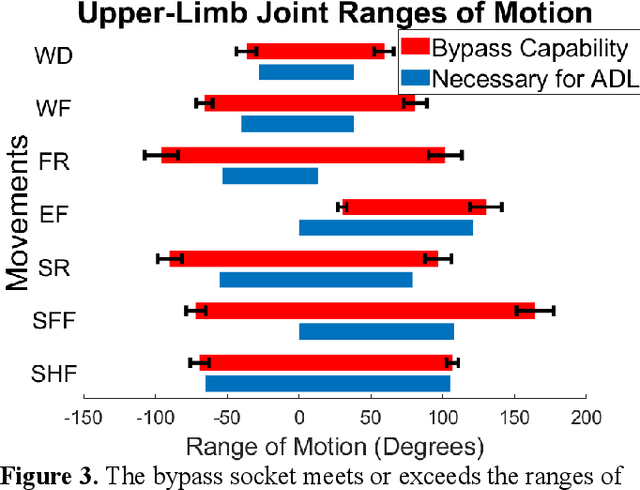
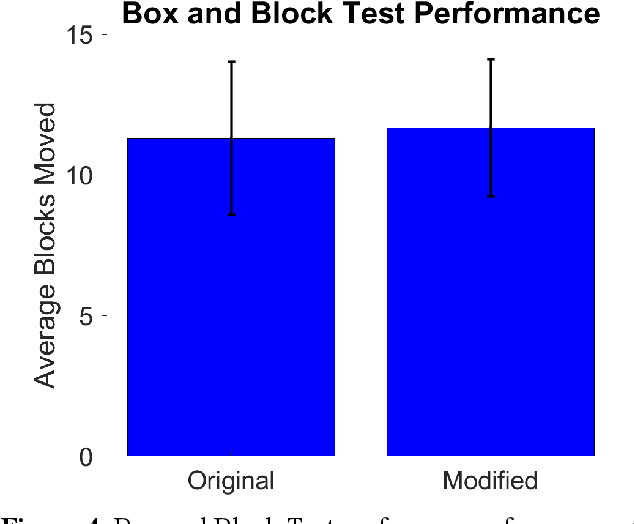
Bypass sockets allow researchers to perform tests of prosthetic systems from the prosthetic user's perspective. We designed a modular upper-limb bypass socket with 3D-printed components that can be easily modified for use with a variety of terminal devices. Our bypass socket preserves access to forearm musculature and the hand, which are necessary for surface electromyography and to provide substituted sensory feedback. Our bypass socket allows a sufficient range of motion to complete tasks in the frontal working area, as measured on non-amputee participants. We examined the performance of non-amputee participants using the bypass socket on the original and modified Box and Block Tests. Participants moved 11.3 +/- 2.7 and 11.7 +/- 2.4 blocks in the original and modified Box and Block Tests (mean +/- SD), respectively, within the range of reported scores using amputee participants. Range-of-motion for users wearing the bypass socket meets or exceeds most reported range-of-motion requirements for activities of daily living. The bypass socket was originally designed with a freely rotating wrist; we found that adding elastic resistance to user wrist rotation while wearing the bypass socket had no significant effect on motor decode performance. We have open-sourced the design files and an assembly manual for the bypass socket. We anticipate that the bypass socket will be a useful tool to evaluate and develop sensorized myoelectric prosthesis technology.
* 8 pages, 5 figures